产品简介

详细说明
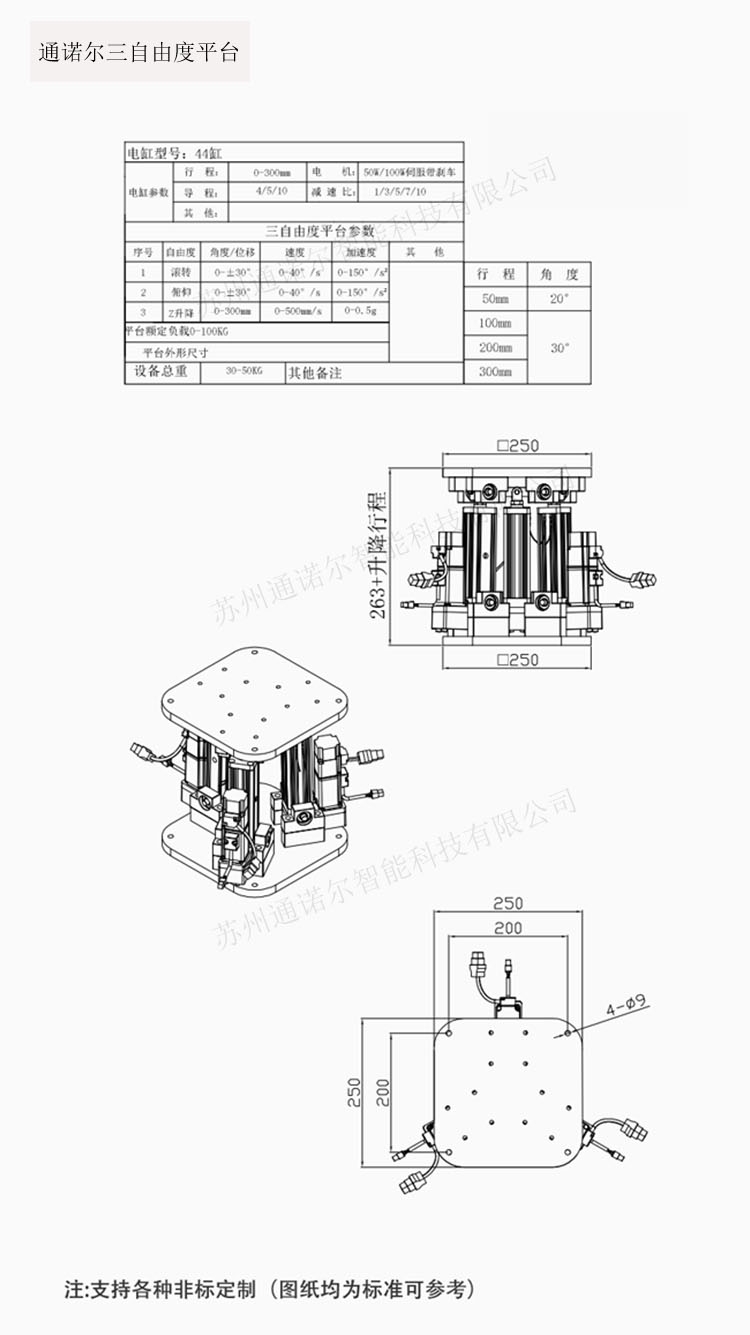
1. 三自由度平台系统是由三自由度运动平台、计算机控制系统、驱动系统等组成。下平台安装在地面的固定基座基上,上平台为支撑平台。计算机控制系统通过PLC控制驱动器从而控制电机以协调控制电动缸的行程,实现运动平台的三个自由度的运动,。
各主要部分简述如下:
1)运动平台 上平台:连接需要被模拟动作的机构 上铰链:双回转轴的虎克铰结构,用于连接上平台与电动缸的活塞杆。 下铰链:单虎克铰结构,用于连接固定基座与电动缸的筒体。 下平台:安装固定基座。
2)计算机控制系统硬件 运动控制计算机(伺服控制单元):实现平台系统启动/停止、接收上位机发来的位姿控制信息、对电动缸进行运动控制、监控伺服电机驱动器的工作状态、监控系统的运动状态、完成故障处理以及安全保护工作。 信号调理单元:完成与平台系统运动状态相关的各种传感器信号、测试信号和数字I/O信号的调理,以及伺服驱动器的驱动等。
3)系统控制软件 运动控制计算机的软件包括运动控制软件和逻辑控制软件。





在线询盘/留言
免责声明:以上所展示的信息由企业自行提供,内容的真实性、准确性和合法性由发布企业负责,本网对此不承担任何保证责任。我们原则 上建议您选择本网高级会员或VIP会员。
企业信息

最新供应
- 美国AB变频器22B-D012N204特惠
- 罗克韦尔变频器20BC260A0ANNANC0技术参数
- 美国AB变频器22B-D010H204设备型号
- 罗克韦尔变频器20BC105A0AYNACC1现货低价
- 美国AB变频器22F-A8P0N103特点
- 罗克韦尔变频器20AC037C0AYNANC0优惠
- 罗克韦尔变频器20BC105A0AYNANA0技术参数
- 罗克韦尔变频器20AC030A3NYNANC0厂家直销
- 罗克韦尔变频器22B-D4P0N104设备型号
- REXROTH BOSCH R900433346
- 广西台达DVP14SS211R可编程控制器14点主机销售代理
- 美国AB变频器20BC260A3ANNADC0现货特价
- Parker VM125A10VM
- 罗克韦尔变频器22F-A4P2N113说明书
- Rexroth DR-10-4-52/315XY
推荐供应
