产品简介

详细说明
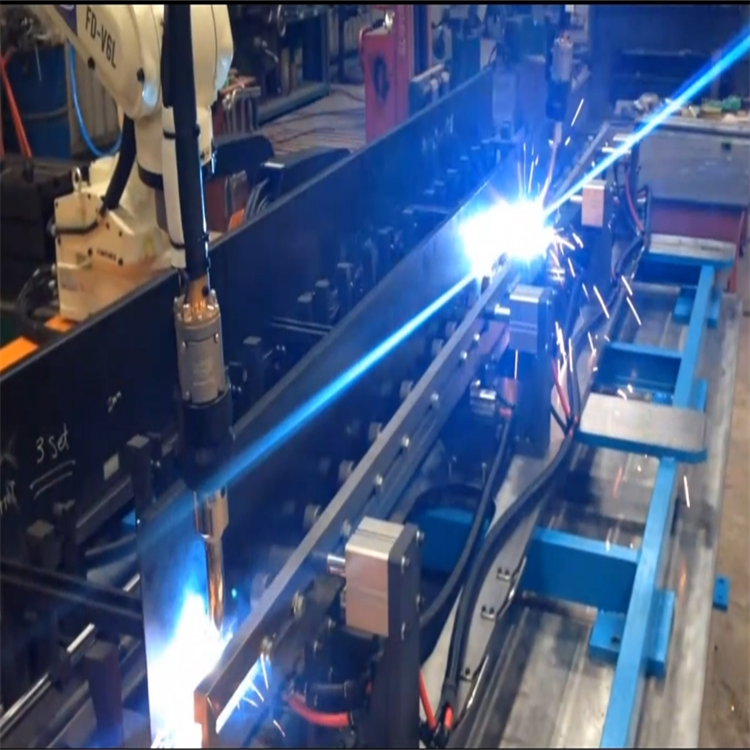
弧焊用机器人的基本功能有哪些?
弧焊过程比点焊过程要复杂得多,工具中心点(TCP),也就是焊丝端头的运动轨迹、焊枪姿态、焊接参数都要求精确控制。所以,弧焊用机器人除了前面所述的一般功能外,还必须具备一些适合弧焊要求的功能。
虽然从理论上讲,有5个轴的机器人就可以用于电弧焊,但是对复杂形状的焊缝,用5个轴的机器人会有困难。因此,除非焊缝比较简单,否则应尽量选用6轴机器人
弧焊机器人除在作"之”字形拐角焊或小直径国焊缝焊接时,其轨迹应能贴近示敎的轨迹之外,还应具备不同遂动样式的软件功能,供编程时选用,以便作摆动焊,而且摆动在每一周期中的停顿点处,机器人也应自动停止向前运动,以满足工艺要求。此外,还应有接触寻位、自动寻找焊缝起点位置、 电弧跟踪及自动再引弧功能等。
在线询盘/留言
免责声明:以上所展示的信息由企业自行提供,内容的真实性、准确性和合法性由发布企业负责,本网对此不承担任何保证责任。我们原则 上建议您选择本网高级会员或VIP会员。
企业信息

最新供应
- Lam Research 810-072687-004 Rev
- 716-077262-004 / RING, EDGE,
- 716-030135-001 / FOCUS RING
- 716-331089-001 /CERAMIC
- LAM 853-800749-015
- Lam Research 810-013872-002 Rev J
- 853-900986-101 / INDUSTRIAL PC
- 810-046015-009 / PCB ASSY
- 715-011531-008 / ELECTRODE
- Lam Research 716-014843-353
- LAM Research, 853-001983
- 715-025106-001 / PLATE- LOWER
- Lam Research 810-801237-001
- LAM RESEARCH 715-030861-820
- 716-037794-120 REV B
推荐供应
