
保证设备稳定性及多机共用程序一致性。
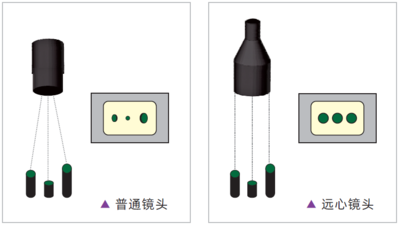
● 工业相机 + 远心镜头
整个视野内无阴影效应,使得高元件焊点检测不受影响。
■ 核心技术及优势
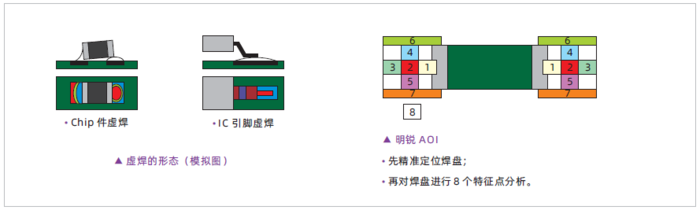
● 元件级焊盘定位+FOV辅助定位技术

在精准定位焊盘的基础上,对焊盘的多个特征点进行分析,无论 Chip 还是 IC 的虚焊都能有效检出。
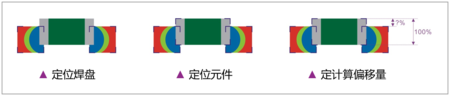
● 检测参数与 IPC 标准直接对接
以 IPC 检验标准为参照,检测结果更加可靠。偏移:IPC-A-610-G Class 3 元件焊端偏出焊盘部分超过焊端宽的 25% 时不可接收。
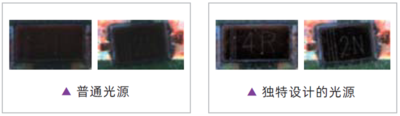
● 镭射文字检测
对于镭射文字或条码,仅利用 R/G/B 三色光会存在无法读取的问题。 三本采用独特设计的光源,能很好的对镭射文字进行检测。
| 类别 | 项目 | 规格参数 | |
| 视觉识别系统 |
判别方法 |
矢量分析算法,集成逻辑或运算,双边亮度边界距离,元件本体跟踪,OCV,亮度模板匹配,颜色距离,颜色抽取(RGB & HSV),亮度极差,亮度偏差,亮度变化最小跨度等三十余种演算法 |
|
|
摄像机 |
500万像素进口高速彩色相机,可选1200万像素 | ||
|
镜头 |
高分辨率远心工业镜头,20um,15um,10um | ||
| 光源 |
红绿蓝三色环形光源 |
||
| FOV |
48.96mmx40.96mm (20um) ,36.72mmx30.72mm (15um) |
||
|
0201元件 |
<7.6ms |
||
|
每画面处理时间 |
220~450ms |
||
|
锡膏印刷 |
有无、偏斜、少锡多锡、断路、污染 |
||
|
零件缺陷 |
缺件、偏移、歪斜、立碑、侧立、翻件、极性反、错件、破损 | ||
|
焊点缺陷 |
锡多、锡少、连锡,铜箔污染等(符合RoHS 无铅焊接检测要求) |
||
|
波峰焊检测 |
多锡,少锡,短路,苞焊,沙孔 | ||
|
可检测最小元件及间距 |
01005& 0.3mm pitch(15um) |
||
| 机械系统 | PCB 传送系统 | 双轨道PCB传送,独立视觉识别系统,可同时进入两款不同规格尺寸的PCB,自动进出板和自动宽度调整系统,符合SMEMA标准。轨道高度900±20mm。 | |
| PCB尺寸 |
双轨道可同时进出PCB尺寸:50×50 mm~420×310 mm, |
||
| PCB厚度 |
0.5 – 5.0mm |
||
|
PCB翘曲度 |
<2mm(有夹具辅助矫正变形) |
||
|
零件高度 |
TOP≤25mm(特制), BOT≤30mm(特殊要求可订制) |
||
| 驱动设备 | 交流伺服电机系统,相机在X和Y轴方向移动,(PCB固定不动有利于锡膏印刷和贴片之后的检测) | ||
| 定位精确度 | <10um | ||
| 移动速度 | Standard:500mm/s,Max:800mm/s | ||
| 软件系统 | 操作系统 | Microsoft Windows 7 X64 | |
| 特点 |
双轨检测系统,可和双轨高速生产系统无缝对接 以矢量计算为基础,综合运用颜色抽取、亮度抽取)以及颜色空间距离算法,对贴装元件及焊点的位置、外形进行精确的定位和分析,准确剔除各种不良点。 |
||
| 操作 | 图形化编程,所见及所得。中文/英文,繁体/简体 | ||
| 编程 | 支持离线编程(选配) | ||
| 电脑主机 | 工业控制计算机,Inb四核I7 CPU,16G DDR内存,2TB硬盘 | ||
| 显示输出 | 22 inch TFT,22英寸液晶宽屏显示器。 | ||
| 联网功能 | 多机台控制 | 可通过控制终端控制多台同型号设备 | |
| 联网功能 | 可和NG终端联网,在维修工作站检查、维修PCBA 错误 | ||
| 通讯端口 | SMEMA, RS232,RJ45 | ||
| 其他参数 | 设备外形尺寸(长*宽*高) | L890*1380*1560mm(不含信号灯) | |
| 重量 | ~800kg | ||
| 电源 | 交流220伏特+/-10%,频率50/60Hz,额定功率1000W | ||
| 气源 | 0.5MPA.80cm3/min | ||
| 使用环境 | 温度10-40℃,湿度 30-80%RH | ||
- 6ES7414-2XG03-0AB0产地
- 6ES7405-0RA02-0AA0原装正品
- 6ES7416-2XL00-0AB0品质保证
- 6ES7451-3AL00-0AE0新品热卖
- 6ES7461--0AA01-0AA0质保一年
- 6ES7461-3AA01-0AA0量大从优
- 6ES7416-2XK02-0AB0现货
- 6ES7470--0AA00-0AA0量大从优
- 6ES7441-1AA04-0AE0库存现货
- 6ES7414-3XM05-0AB0库存现货
- 6ES7492-1AL00-0AA0原装正品
- 6ES7421-1FH00-0AA0质保一年
- 6ES7460--0AA01-0AB0库存现货
- 6ES7413-1XG01-0AB0新品热卖
- 6ES7490--0AB00-0AA0质保一年
