
公司主要生产经营全位置管道自动焊机,包括:热力管道焊机,供水管道焊机,石油管道自动焊机,全自动天然气管道焊机,化工管道焊机, 我公司为实现野外管道焊接的效率、质量减轻操作人员的劳动强度,针对于长输管道的焊接而设计的管道对接自动焊机。 长输管道是现代物业输送的重要手段,管道焊接时长输管道铺设的关键。我国的许多工程有长距离、大管径、大壁厚等施工特点,单靠国内内的焊条电弧焊,工人的劳动强度大,生产效率低,施工进程十分的缓慢。且我国的管道焊接工人短缺,人工工资较高 ,管道自动焊接已在我国开始应用。可根据客户的要求设计各种管道焊接设备和管道坡口设备、制造安装。提供免费培训技术咨询、成套服务。我公司产品广泛用于热力管道、石油管道、石化管道、化工管、城市水管管道、造船电力管道等.

联系人:秦经理15201133137 010-62817931
传 真:010-62817931
邮 箱:272315659@qq.com
网 址:www.guandaohanji.com
公司地址: 北京市昌平区沙河镇昌平路99号沙河科技园M座103
|
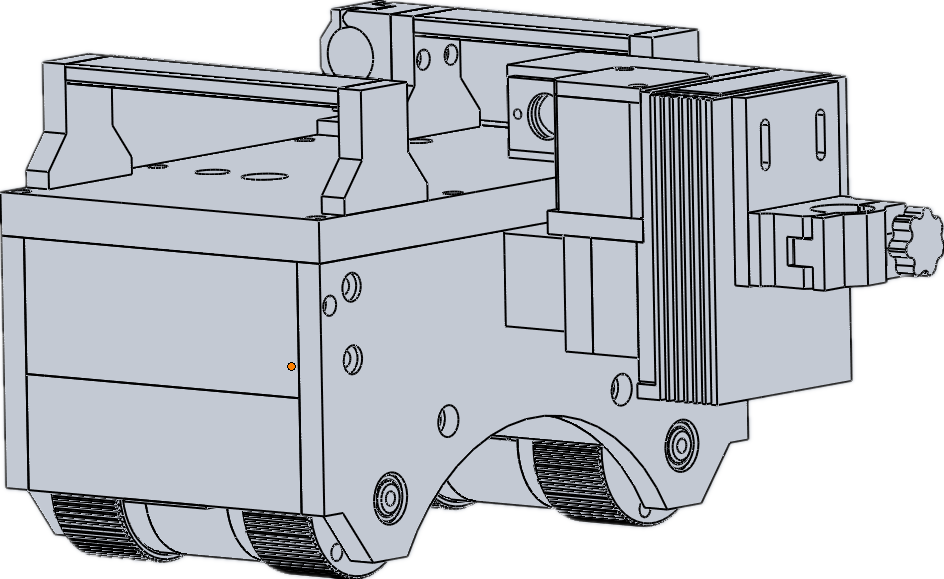
GD130-TX管道全位置自动焊基础 一.前言 在管道工程施工中,焊接质量是保证工程质量最重要的环节之一,焊接效率也直接影响着施工进度,即工程的质量和进度在极大程度上取决于焊接质量和焊接进度。随着输油输气管道向大口径、长距离、高强度、高压力的不断发展,焊接的难度越来越大,对焊接质量的要求也越来越高。靠手工电弧焊和药芯焊丝半自动焊是很难满足上述要求的。而管道全位置自动焊,则是能够满足要求的一项全新的焊接工艺。管道全位置自动焊,是管子固定不动,焊接小车绕管子转动来实现管子全位置(平、立、仰)的焊接。焊接过程由机械和微机完成,受人为的影响因素较小,所以管道全位置自动焊具有焊缝质量好、焊接效率高等优点。管道自动焊并不是简单地用机器代替焊工操作。为保证机械化焊接作业的高质量和高效率,自动焊需要大量、细致的辅助工作。这些辅助工作的主要目的是保证自动焊作业过程顺畅、机械化焊接质量可靠,主要包括:勘察设计时确定适合于自动焊作业的管道纵向坡度,选择较小的冷弯管角度,尽量减少热煨弯管数量等;钢管制造时减小管口椭圆度、管端平直度和周长等制造参数的误差范围;现场加工坡口的管端平直度、尺寸一致性、坡口面光洁度等加工质量的保证;自动焊机组人员的操作技能和相互间配合的熟练度,自动焊工作站之间的配合与衔接;对自动焊焊缝金属无损检测方法、检测标准的统一认识,无损检测环节对自动焊系统误差而产生缺欠的及时反馈与纠正;自动焊操作工、无损检测、监理、质量监督、业主等技术和管理人员相关专业知识的培训与学习等。管道自动焊技术在我国石油天然气长输管道建设中的应用范围不断增加,但其应用率与国外相比仍然是比较低的,应用的效率、质量、成本等综合效益尚未达到其应有的水平。自动焊技术应用过程中发现的种种问题,表面看起来与设备、使用者、焊接材料及管理规定等有关,实质是没有从根本上理解自动焊对其相关辅助工作要求的严格性。因此,应将自动焊作业及其上下游工作作为一个技术体系对待,并在这一技术体系内追求各专业的技术进步及相关管理人员专业知识的提升。随着自动控制技术和电弧跟踪技术的不断完善,熟练掌握自动焊操作技能的员工队伍不断扩大,管道自动焊技术会越来越适应石油天然气长输管道的现场焊接需求,其焊接质量和经济效益都将得到提高,并逐渐成为管道建设的主要现场焊接方式。 二. GD130-TX管道全位置自动焊接系统构成及主要技术指标 GD130-TX管道全位置自动焊接系统由焊接小车、送丝装置、遥控器、焊接电源、保护气体供给系统等组成。 GD130-TX管道全位置自动焊机的主要性能指标如下: (1)焊接速度0-2400mm/min连续可调。 (2)送丝速度0-16m/min连续可调。 (3)电弧电压14-27V连续可调。 (4)摆动宽度最大40mm。 (5)摆动轨迹任意设定。 (6)单摆时间最小250ms。 (7)焊接方式熔化极气体保护源(GMAW)。 (8)焊丝直径0.8-1.6mm。 (9)保护气体C02+Ar。 (10)送气、滞后断气时间任意设定。 (11)适用焊接电源硅整流或逆变电源(350A以上),具有焊接电源远控。 (12)适用管径130mm以上。 (三)行走结构 (1)焊接小车。焊接小车由行走机构、送丝机构、焊枪姿态调整机构等组成。
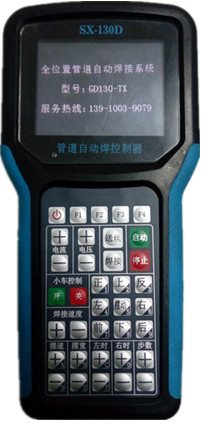
行走小车 遥控器 (四)自动控制系统 GD130-TX管道全位置自动焊机控制系统采用了数字信号处理器(DSP)为核心的先进运动控制技术,运算精度高,可对四个控制电动机实现全数字化伺服算法控制。控制系统硬件结构:
(2)I/O通道。I/O通道主要作用是为手持盒和焊接电源控制提供一个信号的输入、输出通道。 (3)手持遥控器。手持遥控器设有电流电压调节,焊接方向功能键、焊道选择功能键、焊枪位置调节键、焊车行走控制健、送丝状态控制键、焊接过程控制键、焊接过程复位键以及焊枪增幅调节键。自动焊机的控制全部通过手持操作盒来完成。 (4)焊接电源的控制。为满足自动焊接的需要,是将焊接电源送出的8位二进制数字转化为模拟电压信号或线性分段递变电阻值,以便由焊接程序自动控制电弧电压。 (5)伺服电动机的闭环控制。运动控制器在运行时自动闭合电动机的数字伺服环,伺服环的功能是通过反馈产生使电动机的实际位置逼近所要求位置的输出。 |
 器
器
三、GD130-TX管道全位置自动焊接系统特点
GD130-TX管道全位置自动焊工艺性能好、对管口适用性强的特点,焊接根焊焊道。利用管道全位置自动焊,焊接效率高的特点,焊接填充和盖帽焊道。此工艺具有如下特点:
1.STT气体保护半自动焊工艺特点
(1)引弧容易。
(2)电弧燃烧稳定。
(3)焊接烟尘和噪音小。
(4)飞溅极小。
(5)内焊道成形美观。
(6)操作容易。
(7)焊接成本较低。
(8)焊接效率较高(与手工电弧焊和钨极氩弧焊相比)。
(9)抗风能力差(与手工电弧焊相比)。
(10)特别适用管口根焊道的焊接,也适用于其他焊道的焊接。
2.管道全位置自动焊接设备的工艺特点
(1)焊接工艺参数输入器(牛顿信息包),可储存多组焊接工艺参数,以适用多台焊机和不同规格钢管的需要。
(2)本焊焊接设备大部分焊接工艺参数由焊接工艺参数输人器输入,焊工不能对其进行修改(焊接工艺参数由焊接技术人员输入),确保了焊接工艺参数的准确性。
(3)焊接电弧燃烧比较稳定。
(4)焊接生产率高,与手工电弧焊相比可提高2~5倍。
(5)焊缝成形美观,内部质量好。
(6)可采用CO2气体或混合气体(Ar+CO2)作为保护介质。
(7)适用管径φ≥150mm,适用管壁厚度δ≥5mm。管径越大、壁厚越厚,其经济效益越好。
四、GD130-TX管道全位置自动焊接系统工艺原理
1.STT焊接工艺原理
STT焊接电源是一种以表面张力为熔滴主要过渡力的CO2气体保护半自动焊。
STT焊接电源具有波形控制功能,根据熔滴的不同过渡过程。控制焊接电流和电弧电压的波形。即焊接电源能自动调节焊接电流和电弧电压达到电弧所需的瞬时热量。确保焊接电弧的稳定燃烧和有效地控制焊缝成形。
2.管道全位置自动焊工作原理
GD130-TX管道全位置自动焊机,是专门用于管道焊接的自动焊设备。它使用实芯焊丝(φ0.8~φ1.0),采用的保护气体为c02或混合气体(CO2+Ar)。焊接方向为下向焊。送丝速度、焊接速度和摆动频率等焊接工艺参数由焊接工艺参数输入器输入,焊工不能对其进行修改(或只能对某种参数进行一定范围的修改),确保每台焊机和每道焊口焊接工艺参数的一致性。从而保证了各道焊口的焊接质量的均匀性,达到保证焊接质量的目的。
此焊接设备适用窄间隙坡口形式的焊接。窄间隙坡口具有如下优点:(1)焊接接头受热范围小,焊接热影响区小。(2)焊接变形和应力小。(3)焊缝的组织和性能好。(4)节省焊接材料。(5)焊接效率高。
此焊接设备适用于各种坡口形式的焊接。用于V形坡口的焊接时,除焊接效率较窄间隙坡口低外(仍可达到手工电焊的2~5倍),其他焊接优点仍较突出。
五、操作要点
1.焊接性试验及焊接工艺评定
管道全位置自动焊在工程施焊前,应进行焊接性试验。当钢管的材质、规格、坡口型式、焊丝的牌号、焊丝的规格和保护气体种类等发生变化时,均应进行焊接性试验,试验步骤如下:
(1)根据标准要求、理论计算和以前的经验,初步确定焊接工艺参数范围。
(2)在确定的焊接工艺参数范围内,设定几组不同的焊接工艺数进行焊接工艺性试验。对焊接后的试件进行外观检查和无损探伤,缩小焊接工艺参数的范围。
(3)在拟定的焊接工艺参数范围内,重新进行试验,确定一组最佳的焊接工艺参数。
(4)用确定的焊接工艺参数进行多道焊口(一般不少于5道)做模拟施工环境的焊接试验。并对试件进行外观检查和无损探伤。确定良好的焊接质量是否稳定。若不稳定应调整参数重新试焊,直至焊接质量达到规定的稳定状态。
(5)焊缝的外观质量和无损探伤质量良好稳定后,应抽一个(或2个)管口进行力学性能试验。试验的各项指标均合格后,方可应用于工程焊接。
2.焊工考试
焊工在从事新的焊接项目前应进行考试。考试项目包括与考试项目相关的焊接基础理论知识和试件的操作技能。应对试件进行外观检查和无损探伤,各项指标均合格后发给焊工合格证。
3.焊前准备
自动化程度越高的焊接,对焊前准备工作要求就越严格。管道全位置自动焊焊前准备包括如下几个方面:
(1)焊接设备的调试及各工艺参数的确定:
在焊接前应对焊接设备进行调试,确保设备各部分运转正常,并按焊接工艺评定编制的焊接作业指导书的要求输入各焊接工艺参数。
(2)管口的测量和修整:
严格按焊接作业书的要求,对坡口角度、钝边厚度及管口的圆度、垂直度和平面度等进行测量,不符合要求的必须进行修整,直至达到要求,否则不得施焊。
(3)管口清理:
焊接前必须对坡口及坡口内外两侧进行清理。坡口两侧100mm范围内应无污物,坡口及坡口两侧10mm范围内应见金属光泽。
(4)防风准备:
由于本管道自动焊是气体保护焊,焊接时风速不得大于2m/s。在自然环境下达到此要求的天气很少,所以在野外施工必须采取有效的防风措施。我们采用的是随焊接作业车起吊的专用防风蓬,该防风篷还可防雨,既确保了焊接质量,又提高了工效。
4.焊前预热
当焊接钢管的强度较高、钢管厚度较大、焊接环境温度较低时,在焊接前应对钢管进行预热。预热参数如表1:
表1 预热参数
|
预热温度 |
预热温差 |
预热宽度 |
加热速度 |
|
100~150℃(1) |
≤20℃ |
焊缝两侧各不小于100mm |
≤50℃/min |
(1)标出的是一般低合金钢的预热温度。具体预热温度应视钢材的种类,由焊接性试验来确定。
5.管口组装
管口的组装质量是保证管道全位置自动焊焊接质量的基础,管口组装质量必须符合焊接作业指导书的要求。
6.焊接根焊焊道
采用STT CO2气体保护半自动焊,焊接根焊焊道。焊接工艺参数如下:
根焊焊道焊完后,应对其进行外观检查。对焊缝接头处应采用砂轮机磨平,对其它部位应采用电动钢丝刷清理,清除焊道表面的氧化熔渣(渣量很少)。
7.安装焊机轨道
自动焊接小车行走在焊机轨道上,轨道与管道的同心度和与管口的平行度,直接影响着焊道的质量和操作者的操作复杂程度。我们采用轨道安装专用工具安装轨道,专用安装工具具有下列功能:
(1)测量轨道边缘与管道坡口之间的距离。
(2)调整轨道边缘与钢管坡口之间的距离。
(3)调整轨道的松紧度。
表2 焊接工艺参数
|
序号 |
参数名称 |
参数 |
序号 |
参数名称 |
参数 |
|
1 |
焊材牌号 |
JM-56 |
7 |
电孤电压,V |
18~22 |
|
2 |
焊材规格,mm |
φ0.9 |
8 |
焊接速度,cm/min |
10~18 |
|
3 |
保护气体 |
CO2 |
9 |
送丝速度,m/min |
3.5~5.0 |
|
4 |
气体流量,L/min |
8~12 |
10 |
干伸长度,mm |
5~10 |
|
5 |
基值电流,A |
55~65 |
11 |
电源极性 |
反接 |
|
6 |
峰值电流,A |
390~420 |
12 |
摆动方式 |
直线或微摆 |
轨道安装专用工具的锤面硬度,应稍低于焊接轨道的硬度,过硬易造成轨道的损伤,过软易造成轨道安装专用工具磨损太快。
轨道安装后,应保证轨道与管表面的距离差不大于3mm,轨道与管口端面的距离差不大于2mm。
以上均符合要求后,安装自动焊机。
8.焊接填充焊道
自动焊机安装好后,经检查根焊焊道外观合格,即可进行填充焊道的焊接。根据钢管壁厚确定填充焊道的层数和道数。填充焊道每层的厚度为2~3mm。填充焊道焊接工艺参数如表3:
表3 填充焊道焊接工艺参数
|
序号 |
参数名称 |
参数 |
序号 |
参数名称 |
参数 |
|
1 |
焊接方法 |
自动焊 |
8 |
电弧电压,V |
20~25 |
|
2 |
焊接方向 |
下向 |
9 |
焊接速度,cm/min |
20~35 |
|
3 |
焊材牌号 |
JM-56 |
10 |
送丝速度,m/min |
7.0~9.5 |
|
4 |
焊材规格,mm |
φ0.9 |
11 |
摆动频率,次/min |
120~130 |
|
5 |
保护气体 |
CO2 |
12 |
摆动宽度,mm |
5~8 |
|
6 |
气体流量,L/min |
25~30 |
13 |
干伸长度,mm |
5~10 |
|
7 |
焊接电流,A |
160~220 |
14 |
电源极性 |
反接 |
填充焊道的各层接头应错开50mm以上。盖帽前的最后一层填充焊道,应填至低于管表面1mm左右,以保证盖帽焊道的外观成形。层间应采用电动钢丝刷清除氧化层。
9.焊接盖帽焊道
经检查填充焊道外观合格后,方可焊接盖帽焊道。盖帽焊道的宽度应为每侧比坡口增宽1~2m为宜,最大不应超过3mm。盖帽焊道焊接工艺参数如表4,表5。
六、安全措施
(1)参加施工的电焊工、气焊工必须持有劳动部门颁发的特殊工种安全上岗证。
表7 焊缝外观和无损检查质量要求
|
检查项目 |
质量要求 |
|
|
外观检查
|
①焊缝宽度以每侧比坡口增宽1~2mm为宜,最大不应超过3mm。 |
|
|
无损检查 |
射线探伤 |
GB 3323 Ⅱ级 |
|
SY/T 4056 Ⅱ级 |
||
|
API Std.1104 合格 |
||
|
超声波探伤 |
GB 11345 Ⅰ级 |
|
|
SY/T 4065 Ⅰ级 |
||
|
API Std.1104 合格 |
||
(3)转移工作地点,焊接设备发生故障检修时,必须切断电源后方可进行。
(4)焊接或更换焊丝时,必须戴干燥的手套。
(5)设备与设备之间应保持一定的距离,要避免车辆或其他物体碰撞带电体。
(6)加强个人防护,穿戴完好的工作服、绝缘良好的手套和工作鞋。
(7)气体保护电弧焊弧光辐射比手工电弧焊强,应加强防止紫外线对眼睛和皮服的灼伤。
(8)各种气瓶必须符合《气瓶安全监察规程》的规定,并应定期进行检查。禁止剧烈振动与撞击,搬运时要轻装轻卸。气瓶不得放在太阳下曝晒,使用温度不得超过45℃。
(9)防风蓬应采用铁皮或阻燃布等防火材料制造。
(10)防风蓬必须设有通风口或排烟装置。
(11)焊口周围10m范围内,应无易燃易爆物品。
七、企业效益与经济效益分析
1.企业效益分析
(1)管道全位置自动焊具有劳动强度低、生产率高和环保等优点。随着社会的不断发展,要靠刻苦练习获得优秀焊工的困难越来越大,并且手工焊接质量,受人的因素影响较大。而管道自动焊则受人的影响因素较小,焊缝的质量稳定性好。
(2)焊工的培训周期短,要得到一名优秀焊手工电弧焊焊工,至少要经过一年的严格培训和二年的工程锻炼。而管道自动焊只要有一定焊接基础的焊工经半个月的培训,即可焊出优质的焊缝。
2.经济效益分析
(1)管道全位置自动焊焊丝的熔敷率可达98%以上,而焊条的熔敷率通常为50%~55%,药芯焊丝的熔敷率一般也在75%左右。虽然本焊接工艺需用保护气体,但保护气体所需的经费仅占焊接材料经费的10%~15%。
(2)上述两项综合考虑,管道全位置自动焊焊接材料的经费用量仅是焊条或药芯焊丝经费量的1/3~1/2。
(3)管道全位置自动焊设备投入较大,是焊条焊接设备或药芯焊丝焊接设备的3~5倍。但管道全位置自动焊焊接效率高,焊缝质量好(无损探伤合格率高、力学性能好),焊缝的返修率很低。
本文摘自:http://www.guandaohanji.com/tianranqiguandaohanji/2017022234.html
- 美国AB变频器22F-D6P0N103说明书
- 罗克韦尔变频器22A-D8P7N104现货低价
- 罗克韦尔变频器20F14NC140JN0NNNNN厂家直销
- 美国AB变频器22B-D4P0C104现货低价
- 美国AB变频器22F-A1P6N103优势库存
- 美国AB变频器22F-A011N103厂家直销
- 美国AB变频器22B-D1P4N104国外直采
- 美国AB变频器20F14NC367JN1NNNNN特惠
- 罗克韦尔变频器22C-D088A103特惠
- 罗克韦尔变频器22F-D1P5N113优势库存
- 罗克韦尔变频器22F-D024N114厂家直销
- 美国AB变频器22C-D010N103现货低价
- 美国AB变频器22P-D142A103厂家直销
- 罗克韦尔变频器22F-D018N114正品低价
- 美国AB变频器22P-D038A103使用方法
