
公司:济南拓峰自动化科技有限公司
网址:http://www.jntuofeng.com
联系:郝经理
电话:15689736116
QQ:2334065959
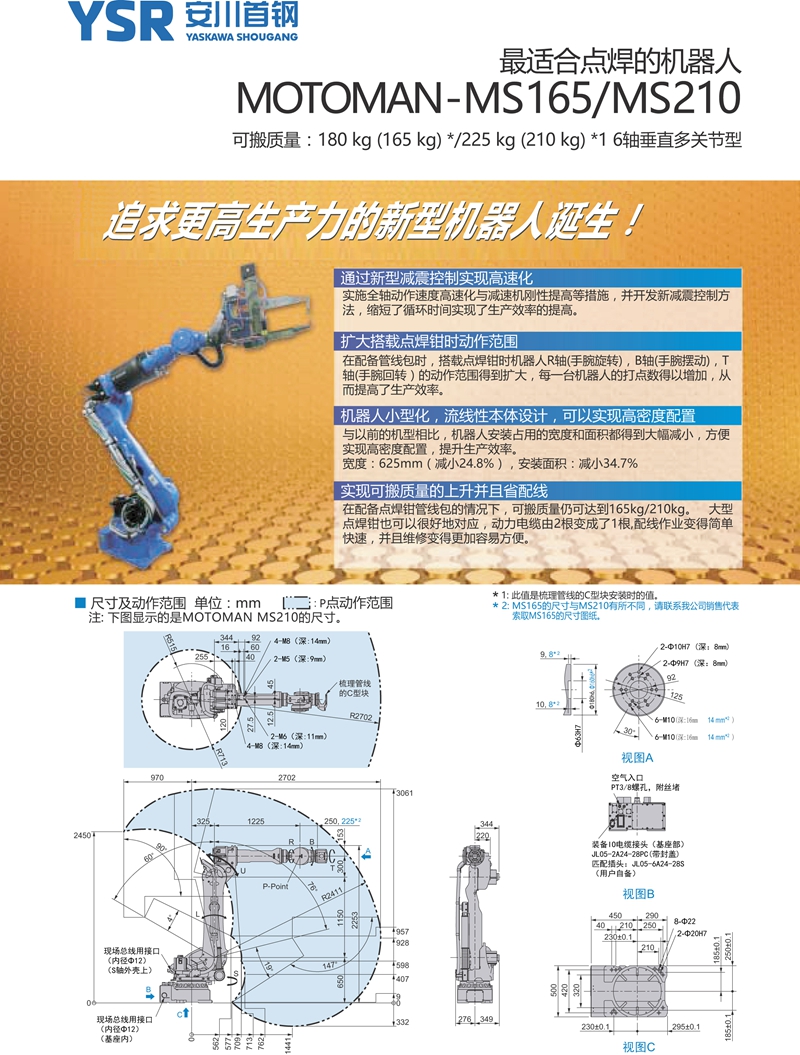
安川点焊装配上下料机器人机械手 MS165
简介:
应对新型控制柜DX200拥有更高生产效率的多功能机器人
6轴垂直多关节
负载:180Kg
动态范围:2702mm
控制柜:DX200
用途:点焊、搬运
特性:
1. 通过新型减震控制实现高速化。
实施全轴动作速度高速化与减速机刚性提高等措施,并开发新减震控制方法,缩短了循环时间,实现了生产效率的提高。
2. 扩大搭载点焊钳时动作范围。
在配备管线包时,搭载点焊钳时机器人R轴(手腕旋转),B轴(手腕摆动),T轴(手腕回转)时动作范围得到扩大,每一台机器人的打点数得以增加,从而提高了生产效率。
3. 机器人小型化,流线性本体设计,可以实现高密度配置。
与以前的机型相比,机器人安装占用的宽度和面积都得以大幅减小,方便实现高密度配置,提高生产效率。
宽度:625mm(减小24.8%),安装面积:减小34.7%。
4. 实现可搬质量的上升并且省配线。
在配备电焊钳管线包的情况下,可搬质量仍可达到165KG/210KG,大型点焊钳也可很好地对应,动力电缆由2根变成了1根,配线作业变得简单快速,并且维修变得更加容易方便。
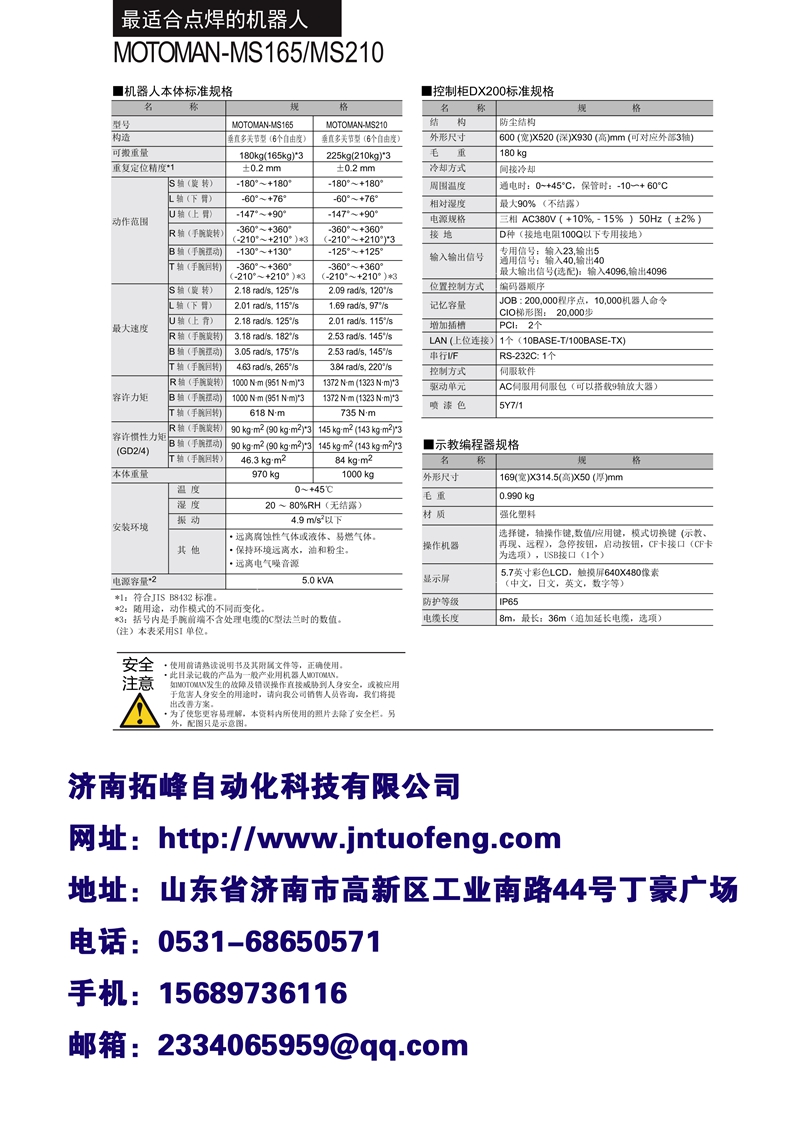
参数:
|
机器人型号 |
MS165 |
|
|
适用控制柜 |
DX200 |
|
|
设置*1 |
F |
|
|
自由度 |
6 |
|
|
可搬质量 |
180kg |
|
|
垂直伸长度 |
3393mm |
|
|
水平伸长度 |
2702mm |
|
|
重复定位精度*2 |
±0.2mm |
|
|
动作范围 |
S轴(旋转) |
-180° ~ +180° |
|
L轴(下臂) |
-60° ~ +76° |
|
|
E轴(肘) |
- |
|
|
U轴(上臂) |
-147° ~ +90° |
|
|
R轴(手腕旋转) |
-360° ~ +360°*4 |
|
|
B轴(手腕摆动) |
-130° ~ +130°*4 |
|
|
T轴(手腕回转) |
-360° ~ +360°*4 |
|
|
最大速度 |
S轴(旋转) |
125°/s |
|
L轴(下臂) |
115°/s |
|
|
E轴(肘) |
- |
|
|
U轴(上臂) |
125°/s |
|
|
R轴(手腕旋转) |
182°/s |
|
|
B轴(手腕摆动) |
175°/s |
|
|
T轴(手腕回转) |
265°/s |
|
|
容许力矩 |
R轴(手腕旋转) |
1000N.m*4 |
|
B轴(手腕摆动) |
1000N.m*4 |
|
|
T轴(手腕回转) |
618N.m |
|
|
容许惯性力矩 |
R轴(手腕旋转) |
90kg.m2*4 |
|
B轴(手腕摆动) |
90kg.m2*4 |
|
|
T轴(手腕回转) |
46.3kg.m2 |
|
|
本体质量 |
970kg |
|
|
电源容量*3 |
5.0kVA |
|
*1:F=置地式,W=挂壁式,C=倒挂式,S=支架式(挂壁式时,S轴的动作会有限制,请注意。)
*2:JIS B 8432为基准。
*3:因用途,动作模式而异。
*4:无装备电缆时的值。
- 台湾丰炜VH系列主机VH-20MR参数资料|百色中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|桂林中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|防城港中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|贵港中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|来宾中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|北海中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|玉林中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|柳州中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|河池中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|贺州中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|崇左中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|钦州中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|梧州中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|南宁中电自动化
- 台湾丰炜VH系列主机VH-20MR参数资料|中电自动化
