
3DM-AHRS300A航姿参考系统(适用VG/AHRS)
3DM-AHRS300A航姿参考系统是一款高性能、低价位的惯性测量设备,可以用于导航、控制和动态测量。此系列产品采用密封设计,在恶劣的环境下仍能精密地测量运动载体的姿态角度、角速度、加速度 。内部采用卡尔曼滤波进行多信息融合,并通过多项补偿保证测量精度。
图1 3DM-AHRS300A航姿参考系统外形
一、应用范围:
导航与控制、平台稳定与控制、通用航空与GPS 组合、船舶姿态的动态测量、采矿和自动耕作、火车和集装箱跟踪等,也适合院校、研究单位进行教学和科学研究使用。
二、产品特点:
1、高性价比、体积小;
2、高可靠性和稳定性;
3、动态环境下±180°姿态输出(横滚、俯仰),结合磁强计输出航向角;
4、高精度A/D转换,保证加速度计分辨率达到0.33 mg,陀螺分辨率达到0.007°/s;
5、全密封可靠设计,保证在恶劣环境下可以正常工作;
6、抗冲击、抗电磁干扰能力强;
7、可替代国内外同类产品。
三、性能指标
表1 3DM-AHRS300A性能指标
|
性能指标 |
参 数 |
单位 |
|
|
输出数据格式 |
姿态角、角速率、加速度等 |
|
|
|
更新率 |
>100 |
Hz |
|
|
启动时间 |
< 1 |
sec |
|
|
姿 态 角 |
测量范围 |
±180 |
degree |
|
静态精度 |
Roll,pitch <0.3 Yaw <1 (with compass or GPS) |
degree |
|
|
动态精度 |
< 1.5 |
degree |
|
|
陀 螺 仪
|
测量范围 |
± 350 |
°/s |
|
分辨率 |
0.007 |
°/s |
|
|
零偏稳定性 |
0.007 |
°/s |
|
|
随机游走 |
2.0 |
°/√hr |
|
|
非线性(全温度) |
0.1 |
% |
|
|
加 速 度 计 |
测量范围 |
± 17 |
g |
|
分辨率 |
0.3 |
mg |
|
|
零偏稳定性 |
0.2 |
mg |
|
|
随机游走 |
0.2 |
m/sec/√hr |
|
|
非线性(全温度) |
0.1 |
% |
|
|
磁
强
计
|
测量范围 |
±3.5 |
gasss |
|
分辨率 |
0.5 |
mgauss |
|
|
零位偏差 |
±4 |
mgauss |
|
|
输出噪声 |
1.25 |
mgauss |
|
表2 3DM-AHRS300A绝对最大额定值
|
性能指标 |
参 数 |
单位 |
|
供电电压 |
8.0 ~12.0 |
V |
|
引脚电压范围 |
-0.3 ~5.25 |
V |
|
结温 |
+125 |
oC |
表3 3DM-AHRS300A电气特性
|
电气特性 |
最小 |
典型 |
最大 |
单位 |
|
供电电压 |
8.0 |
|
12.0 |
V |
|
供电电流 |
50 |
100 |
200 |
mA |
|
功耗 |
1.2 |
W |
||
表4 3DM-AHRS300A物理特性
|
物理特性 |
参 数 |
单 位 |
||
|
尺寸 |
72x72x45(长x宽x高) |
mm |
||
|
重量 |
140 |
gram |
||
|
规定温度范围 |
+25 |
oC |
||
|
工作温度范围 |
-40 |
|
+85 |
oC |
|
存储温度范围 |
-50 |
|
+85 |
oC |
四、接口引脚定义
表5 3DM-AHRS300A引脚定义
|
序 号 |
名 称 |
功 能 |
|
|
|
1 |
+VCC |
供 电 |
||
|
2 |
RX |
RS232-RXD |
||
|
3 |
TX |
RS232-TXD |
||
|
4 |
GND |
地 |
||
|
5 |
Shell |
外壳 |

五、结构尺寸
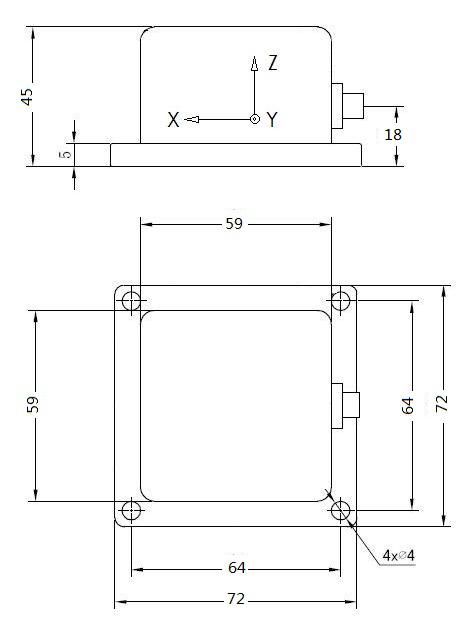
图2 3DM-AHRS300A结构尺寸
六、通讯协议
7.1 通讯接口及设置参数
3DM-AHRS300A航姿参考系统系列接口采用标准RS232和RS485A串行接口,系统加电后,程序在处理器中运行,并通过串行接口连接通讯,启动时间小于1秒。接口参数设置如表6:
表6
|
|
|
|
波特率 |
115200 |
|
数据位数 |
8 |
|
校验位 |
无 |
|
停止位 |
1 |
7.2 通讯协议结构
3DM-AHRS300A航姿参考系统的通讯协议采用统一的报文包结构形式,有效传输数据长度为0-255字节,总长度为5-260字节。其结构形式如下:
|
PRE |
BID |
MID |
LEN |
DATA |
CS |
表7
|
字节段 |
字节数 |
描 述 |
|
PRE |
1 字节 |
首字节,表示包起始(0xFA) |
|
BID |
1 字节 |
设备地址(默认:0x01) |
|
MID |
1 字节 |
报文种类(命令) |
|
LEN |
1 字节 |
数据长度 |
|
DATA |
0 – 255 字节 |
数据 |
|
CS |
1 字节 |
校验位 |
首字节(起始字节)(PRE)
每个消息包都以该字节作为起始字节,是一个特定字节,本版本下首字节为0xFA。
设备地址(BID)
每个微型航姿参考系统(MAHRS)3DM-S10A/都有的设备地址定义,默认为0x01。
报文种类(命令)(MID)
该字节段表示何种报文(命令),具体意义见7.3。
数据长度 (LEN)
表示数据(DATA)的长度,取值为0-255。如果为0,表示无数据字节。
数据(DATA)
报文中包含的有效数据,数据大小由数据长度(LEN)限定。
校验位(CS)
该字节段为一个字节,是报文的校验字节。它是由除其本身外所有字节的异或(XOR)计算得出。
7.3 通讯协议
一般每个报文包含特定的MID值,以及和报文种类(命令)MID相对应的数据长度的数据。3DM-AHRS300A航姿参考系统数据输出方式包括:
w 完全数据输出方式(原始数据);
w 完全数据输出方式(处理数据);
w 姿态角输出方式;
w 四元数输出方式;
w 姿态角及四元数输出方式。
7.3.1 输入报文格式
输入报文内容包括:
AHRS0 AHRS1, AHRS2, AHRS3, AHRS4 命令
AHRS0命令-完全数据输出方式1(VG),连续输出MID=0x80,单步输出MID=0x81;
AHRS1命令-完全数据输出方式2(AHRS),连续输出MID=0x82,单步输出MID=0x83;
AHRS2命令-姿态角输出方式,连续输出MID=0x84,单步输出MID=0x85;
AHRS3命令-四元数输出方式,连续输出MID=0x86,单步输出MID=0x87;
AHRS4命令-姿态角及四元数输出方式,连续输出MID=0x88,单步输出MID=0x89;
在收到输入报文后,微型航姿参考系统(MAHRS)3DM-S10A/B将立即响应,并执行相应的命令,连续或单步输出相应报文信息。
输入报文示例:
AHRS1 命令 – 完全数据输出方式;
输出报文:
0xFA 0x01 0x82 0x00 0x79
输出报文:
0xFA 0x01 0x82 0x40 LL LH HL HH … … … … LL LH HL HH CS
\________(数据区 64字节)________/
输出的报文前三个字节和输入报文相同,表示设备连接正常。第4字节为数据长度0x40,表示数据区有64个字节的有效数据,末尾字节CS为前面所有字节的异或(XOR)。
7.3.2 输出报文格式
如上面描述,用户可选择所需数据输出方式,输出报文格式如表8所示。
表8:输出报文格式
|
字节段 |
字节数 |
字节号 |
描 述 |
|
PRE |
1字节 |
0 |
首字节,表示包起始(0xFA) |
|
BID |
1字节 |
1 |
设备地址(默认:0x01) |
|
MID |
1字节 |
2 |
报文种类(命令) |
|
LEN |
1字节 |
3 |
数据长度 |
|
Data1 |
4字节 |
4-7 |
数据Data1 |
|
DataN |
4字节 |
4N |
数据DataN |
|
CS |
1字节 |
4(N+1) |
校验位 |
3DM-AHRS300A航姿参考系统实际数据输出报文如表9至表13所示。
表9:AHRS0命令-完全数据输出方式1(VG),连续输出MID=0x80,单步输出MID=0x81
|
字节段 |
字节数 |
字节号 |
描 述 |
|
PRE |
1字节 |
0 |
首字节,表示包起始(0xFA) |
|
BID |
1字节 |
1 |
设备地址(默认:0x01) |
|
MID |
1字节 |
2 |
0x80(或0x81) |
|
LEN |
1字节 |
3 |
0x40(64字节) |
|
GyroX |
4字节 |
4-7 |
X轴陀螺角速率原始数据 (rad/s) |
|
GyroY |
4字节 |
8-11 |
Y轴陀螺角速率原始数据 (rad/s) |
|
GyroZ |
4字节 |
12-15 |
Z轴陀螺角速率原始数据 (rad/s) |
|
AccX |
4字节 |
16-19 |
X轴加速度计原始数据 (mg) |
|
AccY |
4字节 |
20-23 |
Y轴加速度计原始数据 (mg) |
|
AccZ |
4字节 |
24-27 |
Z轴加速度计原始数据 (mg) |
|
MagX |
4字节 |
28-31 |
X轴磁强计原始数据 (mguass) |
|
MagY |
4字节 |
32-35 |
Y轴磁强计原始数据 (mguass) |
|
MagZ |
4字节 |
36-39 |
Z轴磁强计原始数据 (mguass) |
|
Quat0 |
4字节 |
40-43 |
四元数1 W (scalar) |
|
Quat1 |
4字节 |
44-47 |
四元数2 X |
|
Quat2 |
4字节 |
48-51 |
四元数3 Y |
|
Quat3 |
4字节 |
52-55 |
四元数4 Z |
|
Roll |
4字节 |
56-59 |
滚动角 (deg) |
|
Pitch |
4字节 |
60-63 |
俯仰角(deg) |
|
Yaw |
4字节 |
64-67 |
方位角(deg) |
|
CS |
1字节 |
68 |
校验位 |
表10:AHRS1命令-完全数据输出方式2(AHRS),连续输出MID=0x82,单步输出MID=0x83
|
字节段 |
字节数 |
字节号 |
描 述 |
|
PRE |
1字节 |
0 |
首字节,表示包起始(0xFA) |
|
BID |
1字节 |
1 |
设备地址(默认:0x01) |
|
MID |
1字节 |
2 |
0x82(或0x83) |
|
LEN |
1字节 |
3 |
0x40(64字节) |
|
GyroX |
4字节 |
4-7 |
X轴陀螺角速率(rad/s) |
|
GyroY |
4字节 |
8-11 |
Y轴陀螺角速率(rad/s) |
|
GyroZ |
4字节 |
12-15 |
Z轴陀螺角速率(rad/s) |
|
AccX |
4字节 |
16-19 |
X轴加速度计(mg) |
|
AccY |
4字节 |
20-23 |
Y轴加速度计(mg) |
|
AccZ |
4字节 |
24-27 |
Z轴加速度计(mg) |
|
MagX |
4字节 |
28-31 |
X轴磁强计(mguass) |
|
MagY |
4字节 |
32-35 |
Y轴磁强计(mguass) |
|
MagZ |
4字节 |
36-39 |
Z轴磁强计(mguass) |
|
Quat0 |
4字节 |
40-43 |
四元数1 W (scalar) |
|
Quat1 |
4字节 |
44-47 |
四元数2 X |
|
Quat2 |
4字节 |
48-51 |
四元数3 Y |
|
Quat3 |
4字节 |
52-55 |
四元数4 Z |
|
Roll |
4字节 |
56-59 |
滚动角 (deg) |
|
Pitch |
4字节 |
60-63 |
俯仰角(deg) |
|
Yaw |
4字节 |
64-67 |
方位角(deg) |
|
CS |
1字节 |
68 |
校验位 |
表11:AHRS2命令 - 姿态角输出方式,连续输出MID=0x84,单步输出MID=0x85
|
字节段 |
字节数 |
字节号 |
描 述 |
|
PRE |
1字节 |
0 |
首字节,表示包起始(0xFA) |
|
BID |
1字节 |
1 |
设备地址(默认:0x01) |
|
MID |
1字节 |
2 |
0x84(或0x85) |
|
LEN |
1字节 |
3 |
0x0C(12字节) |
|
Roll |
4字节 |
4-7 |
滚动角 (deg) |
|
Pitch |
4字节 |
8-11 |
俯仰角(deg) |
|
Yaw |
4字节 |
12-15 |
方位角(deg) |
|
CS |
1字节 |
16 |
校验位 |
表12:AHRS3命令 -四元数输出方式,连续输出MID=0x86,单步输出MID=0x87
|
字节段 |
字节数 |
字节号 |
描 述 |
|
PRE |
1字节 |
0 |
首字节,表示包起始(0xFA) |
|
BID |
1字节 |
1 |
设备地址(默认:0x01) |
|
MID |
1字节 |
2 |
0x86(或0x87) |
|
LEN |
1字节 |
3 |
0x10(16字节) |
|
Quat0 |
4字节 |
4-7 |
四元数1 W (scalar) |
|
Quat1 |
4字节 |
8-11 |
四元数2 X |
|
Quat2 |
4字节 |
12-15 |
四元数3 Y |
|
Quat3 |
4字节 |
16-19 |
四元数4 Z |
|
CS |
1字节 |
20 |
校验位 |
表13:AHRS4命令-姿态角及四元数输出方式,连续输出MID=0x88,单步输出MID=0x89
|
字节段 |
字节数 |
字节号 |
描 述 |
|
PRE |
1字节 |
0 |
首字节,表示包起始(0xFA) |
|
BID |
1字节 |
1 |
设备地址(默认:0x01) |
|
MID |
1字节 |
2 |
0x88(或0x89) |
|
LEN |
1字节 |
3 |
0x1C(28字节) |
|
Quat0 |
4字节 |
4-7 |
四元数1 W (scalar) |
|
Quat1 |
4字节 |
8-11 |
四元数2 X |
|
Quat2 |
4字节 |
12-15 |
四元数3 Y |
|
Quat3 |
4字节 |
16-19 |
四元数4 Z |
|
Roll |
4字节 |
20-23 |
滚动角 (deg) |
|
Pitch |
4字节 |
24-27 |
俯仰角(deg) |
|
Yaw |
4字节 |
28-31 |
方位角(deg) |
|
CS |
1字节 |
32 |
校验位 |
- 6ES7478-1AQ00-0AA0新品上架
- 6ES7405-0KR00-0AA0量大从优
- 6ES7492-1CL00-0AA0现货
- 6ES7470-1AB00-0AA0库存现货
- 6ES7400-1TA00-0AA0模块
- 6ES7414-1XG01-0AB0量大从优
- 6ES7441-2AA04-0AE0产地
- 6ES7455-0VS00-0AE0库存现货
- 6ES7407-0DA00-0AA0品质保证
- 6ES7405-0RA00-0AA0原装正品
- 6ES7417-4XL00-0AB0原装正品
- 6ES7405-0RA00-0AA0现货
- 6ES7461--0AA007AA0质保一年
- 6ES7417-4HL00-0AB0量大从优
- 6ES7431-7QH00-0AB0原装正品
