产品简介

详细说明
- RJS14,17,20,25,32关节模组可选
- 输出连续扭矩为10~200N.m
- 适用有效负载小于10公斤以下的协作机器人
- 额定转速可达40RPM,加速度可达10RPS/S
-
关节输出端重复定位精度高达0.001度
- EtherCAT,CANopen通信可选,支持大部分主流机器人控制器
- 常规为48VDC供电,24~60VDC之间供电可选
- 结构极其紧凑,最小关节仅为90x128mm,重量<2Kg
- 安装拆卸简单、快捷
- 也为客户提供OEM定制化服务

集谐波减速器、无框力矩电机、抱闸器、增量编码器、绝对值编码器、驱动器于一体,让机器人开发更简单。。。更快速。。。
主要特性:
机械传动与电机参数规格:
| 参数 | 单位 | RJS14 | RJS17 | RJS20 | RJS25 | RJS32 |
| 减速器速比 | -- | 100 | 100 | 100 | 100 | 100 |
| 减速器齿隙 | arcsec | 18 | 10 | 9 | 9 | 7 |
| 减速器背隙 | arcmin | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 |
| 转动精度 | arcmin | 2 | 2 | 1.5 | 1.5 | 1.5 |
| 电机极对数 | -- | 6 | 6 | 7 | 8 | 8 |
| 电机额定功率 | W | 117 | 146 | 204 | 380 | 430 |
| 电机额定电压 | V | 48 | 48 | 48 | 48 | 48 |
| 电机额定电流 | A | 4.5 | 4.7 | 7 | 11 | 16 |
| 电机额定转速 | rpm | 3500 | 3000 | 3000 | 2500 | 2000 |
| 电机额定转矩 | Nm | 0.32 | 0.46 | 0.65 | 1.4 | 2.0 |
| 电机转矩常数 | Nm/A | 0.069 | 0.115 | 0.1 | 0.13 | 0.13 |
| 反电动势系数 | V/krpm | 4.3 | 7.17 | 6.26 | 11.29 | 10 |
| 关节重量 | kg | 2 | 2.5 | 3 | 4.5 | 7.5 |
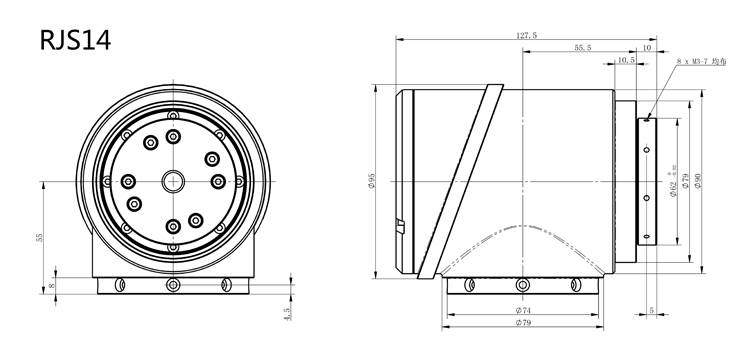
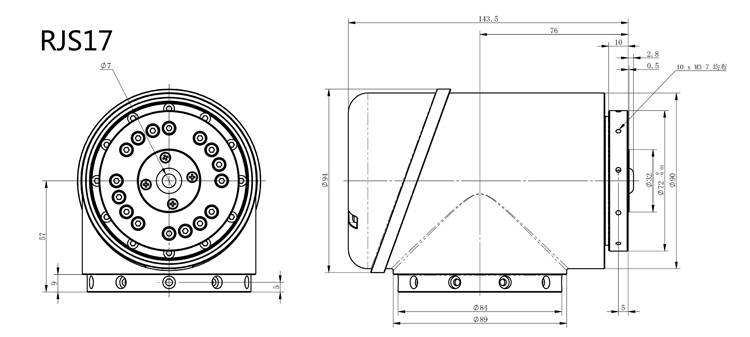
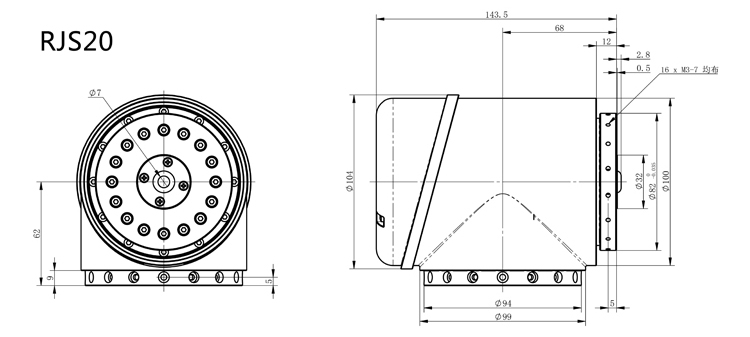
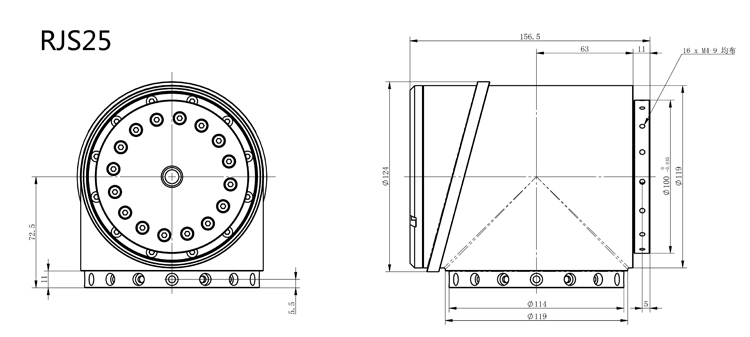
| 关节直径 | mm | 90 | 90 | 100 | 119 | 156 |
| 关节高度 | mm | 100 | 104 | 114 | 135 | 172 |
| 关节长度 | mm | 128 | 144 | 144 | 157 | 162 |
| 许用负载转矩 | Nm | 28 | 54 | 82 | 157 | 333 |
| 平均负载转矩 | Nm | 11 | 39 | 49 | 108 | 216 |
| 最大瞬时转矩 | Nm | 54 | 86 | 147 | 284 | 647 |
| 额定转速 | rpm | 35 | 30 | 30 | 25 | 20 |
| 最大转速 | rpm | 40 | 35 | 35 | 30 | 25 |
| 增量编码器 | P/R | 2500 | 2500 | 2500 | 2500 | 2500 |
| 绝对值编码器 | Bit | 17/19 | 17/19 | 17/19 | 17/19 | 17/19 |
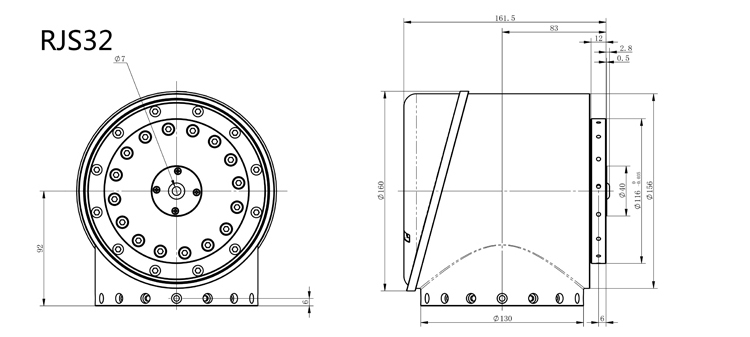
机械尺寸外形图:
在线询盘/留言
免责声明:以上所展示的信息由企业自行提供,内容的真实性、准确性和合法性由发布企业负责,本网对此不承担任何保证责任。我们原则 上建议您选择本网高级会员或VIP会员。
企业信息
最新供应
推荐供应
