
产品简介
| 自营品牌 | 产地类别国产 |
| 电子 |
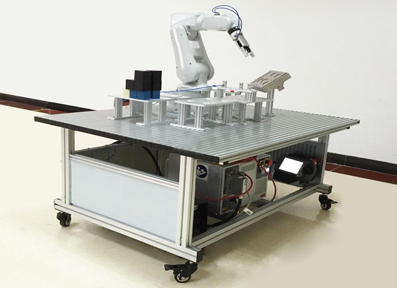
工业机器人实训装置基于可编程逻辑控制器标准的6轴6自由度机器人(含气动夹)及搬运系统模块工作站为核心,并配套气动夹具(操作对象承载平台)、工具存放柜等设施设备及基础教材、仿真软件、工学结合等教学资源。
详细介绍
VS-IR04A工业机器人基础实训系统
一、VS-IR04A工业机器人基础实训系统
KUKA KR 3 AGILUS 是 600 x 600 mm 自动化单元实际应用的理想选择,能在小的空间内实现大化的性能。KR 3 AGILUS 采用智能化设计,具有成本优化,易于维护以及可靠性高等特点,是针对微型工件及产品生产的解决方案,如:小型部件装配、拾取与放置(Pick & Place)、螺接、焊接、粘接、包装、检测或检验等应用。KR 3 AGILUS 作为在其负载级别中速度快的机器人之一,是针对在生产中始终追求短循环时间和高产量的行业量身打造的产品。
(一)技术数据:
动作自由度/轴数: 6
手腕类型: RBR
重复精确度 ±0,02 mm
大作用范围 541 mm
安装位置 地面、天花板、墙
负荷 3 kg
重量 26 kg
变压器额度功率:3.0KVA
周围环境温度(℃):0~40
占地面积 179*179mm
控制系统 SmartPAD KR C4 compact
防护等级 IP 40
运转性能:600 x 600 mm 自动化单元实际应用的理想选择,能在小的空间内实现大化的性能。

(二)其他:
2kg 拾料节拍,运行高度25×长度300×高度25,TCP 大速度 5.8 m/s,TCP 大加速度 28 m/s2;
配套触屏示教器;
机器人电机防护等级要求IP55;
减速机型号要求零维护;
机器人要求具有码垛、矩阵软件包;
机器人线路必须机器人内部走线,气路可外部走;
机器人要求过载保护及安全保护罩功能;
机器人操作说明书和编程手册;
保修期:6 年。
二、实训台(配套操作、实训机构)
(一)实训平台描述:
基于可编程逻辑控制器标准的6轴6自由度机器人(含气动夹)及搬运系统模块工作站为核心,并配套气动夹具(操作对象承载平台)、工具存放柜等设施设备及基础教材、仿真软件、工学结合等教学资源。
(二)技术参数:
基本参数:
1、工作电源:单相三线制 AC220V±5% 50HZ
2、安全保护:漏电保护,过流保护,短路保护
3、额定功率:≥2KW
4、环境温度:-10~50℃
5、相对温度:≤85%
工作台技术参数:
1、实训台外形尺寸:≥1200×850×800;
2、实训台桌面:工业铝型材桌面,携带T 型槽,方便快速安装
3、电器接口:桌面预留10 个以上的电器接口(220V、24V、12V)
4、气路接口:桌面预留10 个以上的气路接口,模块化快换式
5、工作桌桌脚安装四个万向轮,整体移动方便,快捷
6、工作桌留有配件及工具存放柜
机器人本体系统配置参数:
1、选用KUKA机器人KUKA KR 3 AGILUS,负荷3 kg ,臂展541mm,重复定位精度±0.02 mm;铝合金马达,结构轻巧,功率强劲,确保精准度,本体重26kg;多角度安装,可使其不受任何空间限制;气路管路与用户信号线缆由机身底脚至手腕全部嵌入机器人内部,利于机器人集成;
2、配套KR C4 compact工业紧凑型控制器,有效节省占地空间,AC220V电源,外置式信号接头,简化了调试步骤;
3、带workvisua机器人控制软件,可有效提升编程速度,软件带仿真功能,可随时验证编程效果;
4、本体到控制器3~7m长电缆;
5、示教器SmartPAD具中文操作界面,本体到示教器3~7m长线缆;
(三)工作台技术参数(实训台教学单元实训项目):
1、工业机器人平面TCP 编程示教与考核;
2、工业机器人简单轨迹运行编程示教考核;
3、工业机器人坐标标定实训;
4、工业机器人工具手坐标标定实训;
5、工业机器人平面圆形描图任务编程示教与考核;
6、工业机器人平面矩形描图任务编程示教与考核;
7、工业机器人平面多圆弧相切线描图任务编程示教与考核。
8、工业机器人码垛参数设定;
9、工业机器人的点位示教;
10、工业机器人示教器运动操作;
11、工业机器人IO 控制应用;
12、气动吸盘的调试与操作;
13、工业机器人码垛编程示教与考核;
14、工业机器人基于示教器的程序编辑;
15、工业机器人IO 控制应用;
16、气动吸盘的调试与操作;
17、工业机器人定点搬运编程示教与考核;
18、工业机器人拼图编程示教与考核;
19、工业机器人斜面矩形描图任务编程示教与考核;
20、工业机器人斜面圆形描图任务编程示教与考核;
21、工业机器人三维轨迹运行编程示教与考核;
22、工业机器人曲面圆形描图任务编程示教与考核;
23、工业机器人曲面矩形描图任务编程示教与考核;
24、工业机器人末端夹具、执行器自动更换(机器人盘1、工具盘3) ;
25、工业机器人气动吸盘自动更换及连线(提供铝/塑料吸取材料) ;
26、工业机器人气动夹爪自动更换及连线(两爪和三爪各2 个)
27、工业机器人轨迹笔自动更换及连线;
28、工业机器人I/O 控制应用;
29、工业机器人工具手坐标示教及设定;
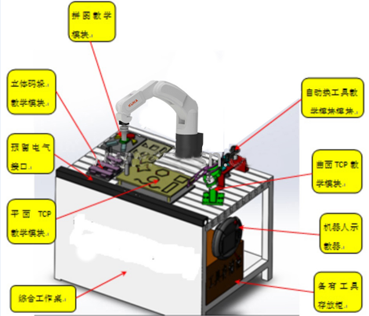
(四)设备设计效果图:
- 变频器 驱动器IC200UEX010耐用性强
- 变频器 冗余模块IC200UEO108为您做得到
- 变频器 驱动器IC200UAL004结构紧凑
- 接触器 模块IC200UAL005安全性能高
- 控制器 端子IC200MDL730顺丰速运
- 电源模块 伺服驱动IC200TBX340诚信经营
- 电源 机架IC200CBL520我必承诺
- 电源 机架IC200GBI001调试方便
- 控制器模块 plcIC200UEX636我们一直在努力
- 接触器 控制器IC200ALG261容量充足
- 驱动器 电缆IC200ALG240为你所委托
- 传感器 伺服驱动IC200MDL143我们一直在努力
- 变频器 驱动器IC200MDL240安全环保
- 输出模块 通讯模块IC200UEX824进口配件
- 变频器 驱动器IC200MDL144让我们做得更好
