
产品简介
| 自营品牌 | 产地类别国产 |
| 电子 |
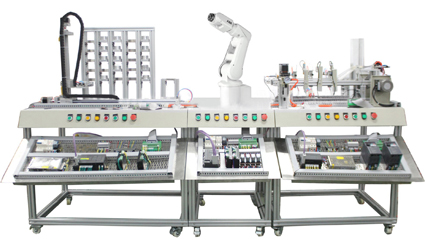
VS-IR05工业机器人及现代物流系统实训平台,主要由机器人主站和立体仓库从站,传送带从站等组成。该系统的各站是安装在带槽的铝型板上,各站可容易的连接在一起组成一条自动加工生产线。站内由各种模块化形式构成,各模块之间易于搭建、拆卸和维护,各工作站之间可随意组合。
详细介绍
VS-IR05工业机器人及现代物流系统实训平台
一、功能特点:
VS-IR05工业机器人及现代物流系统实训平台,主要由机器人主站和立体仓库从站,传送带从站等组成。该系统的各站是安装在带槽的铝型板上,各站可容易的连接在一起组成一条自动加工生产线。站内由各种模块化形式构成,各模块之间易于搭建、拆卸和维护,各工作站之间可随意组合。完成工件的出库分拣以及入库的自动化工作,可由上位机软件控制物料流向,以及位置。
二、技术参数
1、输入电源:单相~220V±10% 50HZ
2、漏电保护:I△n≤30mA, t≤0.1S
3、AC220V交流电源
4、24V直流电源输出
5、事故急停按钮
6、工作环境:温度 -10℃~+40℃ 相对湿度35%~65%(25℃)海拔<4000M
7、装置总容量: ≤5kVA
8、操作压缩空气:5~6bar
9、外型尺寸不小于:1750×850×1600mm;
10、机器人

(1)机器人技术参数
A. 规格
a) 型号:IRB 120-3/0.6
b) 工作范围:580mm
c) 有效荷重:3Kg(4Kg)
d) 手臂荷重:0.3Kg
B. 特性
a) 集成信号源:手腕设10路信号
b) 集成气源:手腕设4路空气 (5 bar)
c) 重复定位精度:0.01 mm
d) 机器人安装:任意角度
e) 防护等级:IP30
f) 控制器:IRC5紧凑型 / IRC5单柜或面板嵌入式
C. 工作范围
a) 轴1旋转:+165°~-165°
b) 轴2手臂:+110°~-110°
c) 轴3手臂:+70°~-90°
d) 轴4手腕:+160°~-160°
e) 轴5弯曲:+120°~-120°
f) 轴6翻转:+400°~-400°
D. 大速度
a) 轴1旋转:250°/s
b) 轴2手臂:250°/s
c) 轴3手臂:250°/s
d) 轴4手腕:320°/s
e) 轴5弯曲:320°/s
f) 轴6翻转:420°/s
E. 性能
a) 1 kg拾料节拍
b) 25×300×25mm:0.58 s
c) TCP大速度:6.2 m/s
d) TCP大加速度:28 m/s2
e) 加速时间:0-1 m/s 0.07 s
F. 电气连接
a) 电源电压:200-600 V,50/60 Hz
b) 额定功率:3.0kVA(变压器额定功率),0.25 kW(功耗)
G. 物理特性
a) 机器人底座尺寸:180×180 mm
b) 机器人高度:700mm
c) 重量:25kg
(2)机器人控制器(IRC5)参数
A. 规格
a) 控制器硬件:
i. 多处理器系统
ii. PCI总线
iii. 大容量闪存盘
iv. 防掉电备用电源
v. U盘接口
b) 控制软件:
i. 成熟的实时操作系统
ii. 高级RAPID程序语言
iii. PC-DOS文件格式预装软件(以DVD为载体)
iv. 扩展功能组,另见RobotWare数据单
B. 电气连接
a) 电源:单相220/230 V,50-60 Hz
C. 物理特性
a) 尺寸(宽×高×深):258×450×565
b) 重量:27.5 kg
D. 环境
a) 环境温度:+0°C(32°F)~ +45°C(122°F)
b) 相对湿度:高95%
c) 防护等级:IP20
d) 达标:
i. 机械指令98/37/EC条例
ii. 附录II B
iii. EN 60204-1:2006
iv. ISO 10218-1:2006
v. ANSI/RIA R 15.06 -1999
E. 用户接口
a) 控制面板:机柜上
b) FlexPendant(示教器):
c) 重1 kg
d) 彩色触摸屏
e) 操纵杆
f) 紧急停
g) 支持惯用左/右手切换
h) 支持U盘
F. 维护:
a) 诊断软件
b) 恢复程序
c) 带时间标记登录
d) 支持远程服务
G. 安全性
a) 安全停、紧急停
b) 2通道安全回路监测
c) 3位启动装置
H. 机械接口
a) 输入/输出::标准16/16(多8192)
b) 数字:24V DC或继电器信号
c) 串行通道:1×RS232(RS422带适配器)
d) 网络:以太网(10/100MB/s)
e) 两条通道:服务和LAN
f) 现场总线(主):
i. DeviceNetTM
ii. PROFINET
g) 现场总线(从):
i. PROFINET
h) 处理编码器:多6通道
I. 传感器接口
a) 机器视觉系统
11.传送带数量不少于4条,采用色标传感器进行工件识别
12.PLC采用西门子PLC,支持PN总线控制。100 KB 工作存储器;120/240VAC 电源,板载 DI24 x 24VDC 漏型/源型,DQ16 x 继电器和 AI2;板载 6 个高速计数器和 4 路脉冲输出;信号板扩展板载 I/O;多达 3 个用于串行通信的通信模块;多达 8 个用于 I/O 扩展的信号模块;0.04ms/1000 条指令;PROFINET 接口,
13.物流系统上位管理软件,要求可以控制物料的流向,现场演示画面。
14.机器人与PLC之间通过总线通讯方式进行交换数据。
★15.物流实训系统虚拟仿真软件(投标时提供软件合法使用证明)
(1) 开发平台拥有完全自主知识产权,国内用户广泛;全中文界面,全程操作可视化,所见即所得;具有独立的建模预览工具包插件,可以一键导出并实时预览;
(2) 具有丰富的虚拟现实素材库与虚拟环境库等,可随时调用;
(3) 支持Lua脚本语言,支持时间轴动画功能,支持用户控件界面自定义设计,支持Flash控件;
(4) 支持顶点着色功能:可用于表现云图效果,例如山地的海拔高度、温度分布等效果;
(5) 支持法线贴图功能:可使用法线贴图来表现模型的凹凸、高光等效果,使场景效果达到次时代游戏级别;
(6) 支持相机转场*:包括淡入淡出、马赛克、运动模糊等转场效果,可使相机在切换过程中的效果更绚丽;
(7) 支持多人在线网络互动。可在互联网上实现多人同时在线,并且提供多种交流方式如文字、图形、表情和动作。
(8) 支持强大的人物角色系统。可方便快速的实现角色选择,动作选择,设置默认动作,设置行走、跳跃、拾取、打招呼、交谈、坐卧、开车等动作。内嵌强大的脚本和函数功能,支持变量和逻辑判断,可对三维场景进行各种控制和交互。支持打包为可独立执行的.Exe文件和虚拟现实文件进行发布,运行前不需要事先安装任何其他文件支持与for 3dsmax无缝集成。使用3dsmax作为主要建模工具。导出方便快捷,只需要按一下按钮,即可导出场景并预览。
(9) 支持强大的physics物理系统。可实时计算虚拟现实三维场景中,物体与场景之间,物体与角色之间、物体与物体之间的运动交互和动力学特性。
(10) 支持非聂耳水面*。可设置水面的颜色、反射组、折射组、非聂耳偏移、非聂耳指数、波纹密度、波纹流向和波速、以及水深设置等。
(11) 支持各种全屏*。包括BLOOM、HDR、全屏泛光、运动模糊、景深等。
(12) 支持高真实感、高效实时渲染画质。可以利用3dsMax中各种全局光渲染器所生成的光照贴图,使场景具有非常逼真的静态光影效果。支持的渲染器包括scanline , radiosity, lighttracer, finalrender, vray,mentalray。给予技术人员以大的支持,使其能够充分发挥自己的想象力,贯彻自己的设计意图,没有过多的限制和约束。
(13) 支持大规模场景的组织和渲染能力,运用游戏中的各种优化算法,提高场景的组织与渲染效率,使画面更具张力。
(14) 支持各种事件触发,包括三维模型和二维按钮的实时点击、弹起、鼠标移入移出;可映射键盘、方向盘、手柄的按键事件。
(15) 支持二维导航地图,并可实时定位。
(16) 支持建筑位置、大小、方位任意调整。
(17) 支持任意模型的实时复制、删除。
(18) 支持自动漫游、手动漫游,可自定义漫游轨迹。
(19) 支持骨骼动画、位移动画、变形动画。骨骼动画:主要用于实现人物或角色的各种动作;位移动画:用于实现刚性物体的运动轨迹,如开关门,风扇旋转,汽车开动等;变形动画:用于实现物体的自身顶点坐标变化,如花草树木随风摆动,水面的波纹等。
(20) 支持刚体动力学、物流仿真模拟。可利用3dsmax的Reactor动力学引擎计算的结果,以可视化的方式展现动态过程;可利用3dsmax的关键帧动画,实现物体运动,可用于物流仿真。
(21) 支持高效、高精度碰撞检测算法。可自动完成对任意复杂场景的高效碰撞检测,对建模基本没有限制。能够正确的处理碰撞后沿墙面滑动(而不是停止),楼梯的自动攀登,对镂空形体(如栏杆)以及非凸多面体的精确碰撞,以及正确的处理多物体碰撞后过约束的情况。还可以实现碰撞面的单向通过,隐形墙以限制主角的活动范围等功能。
(22) 支持各种生物*,可模拟火焰、爆炸、水流、喷泉、烟火、霓虹灯,电视等、天空盒、雾效、太阳光晕、体积光、实时环境反射、实时镜面反射、花草树木随风摆动、群鸟飞行动画、雨雪模拟、全屏运动模糊、实时水波等。
(23) 功能强大的实时材质编辑器。可以让用户仅通过简单而直观的操作实现各种复杂的实时材质模拟,如:塑料、木头、金属、玻璃、陶瓷、锡箔纸等。可实现普通、透明、镂空、高光、反射、凹凸材质*。可用材质库管理材质的保存和读取。具有材质球预览功能,材质的调整所见即所得。可方便的调整材质的各项属性,如颜色、高光、UV、贴图、混合模式等。支持多层贴图。
(24) 支持二维界面编辑、独立运行功能。可为项目设计各式各样的界面,加上面板和按钮,设置热点和动作,全程可视化操作。界面上的布局可以任意设定,渲染区域位置可以任意,面板上可设置图片及其透明度。
(25) 支持贴图格式批量转换和资源管理,可方便的对各种格式的贴图进行查看,支持格式包括:jpg、bmp、psd、png、tga、dds。直接查看图片的alpha通道。可实现文件同步,即:将图片调入其它编辑软件(如photoshop)进行处理时,可保持同步更新,以及时观察修改后的效果。可查看场景中用到的所有贴图,统计其容量,可对贴图的加载格式和大小进行设定,支持各种压缩格式。可自动收集场景中所用到的所有贴图,便于管理。
(26) 支持IE文件嵌入网页浏览器,支持网络在线浏览。
(27) 支持嵌入各种多媒体软件,如Neobook,Director,MMB等。
(28) 支持各种工业造型软件,如Pro/e,UG,SolidWorks,SolidEdge。
(29) 支持各种三维建筑和地形造型软件如Civil3d,Revit等。
(30) 支持SDK二次开发,具有良好的可扩展性能。
16.工业机器人示教编程软件:
| 软件名称 | 软件功能 | 功能简述 |
| 工业机器人示教编程 | 软件界面 | 工作场景:逼真的生产加工车间,每种工业机器人及其应用环境排列其中,呈现出真实的视觉效果。 |
| 隐匿式菜单:将电脑屏幕完整地用于工作场景展示,当鼠标移动到屏幕边界时,菜单自动出现。 | ||
| 操作方式: | ||
| 新手上路:采用游戏通关方式,只需几分钟即可学会软件操作。 | ||
| 教学功能 | 教:以三维仿真演示,结合文字、语音,分别以单独典型的案例进行示范教学。案例包括下象棋、绘画、码垛、焊接、上下料。 | |
| 学:可通过多种方式(如二维码),随时查看理论知识(微课、电子教材等)。 | ||
| 练:学生利用虚拟仿真软件自主进行示教编程的基本训练和综合项目训练。 | ||
| 控:对自主训练时不规范、不安全的行为进行监控,及时制止,技能与素养并重。 | ||
| 考:以游戏闯关方式考核,对操作过程及结果进行综合评分,输出考核记录表。 | ||
| 教学案例 | 下象棋: | |
| 绘画: | ||
| 上、下料: | ||
| 焊接: | ||
| 码垛 | ||
| 机器人选型 | 典型六自由度工业机器人。 | |
| 机器人操控 | 1)单轴运动控制,调速,开关,急停,启停、限位、碰撞检测等。 | |
| 结构认知 | 引出线:引出线将同时显示各部件名称,可根据用户观察视角与设备的距离自动进行层级显示。距离设备越近,显示项目越多。 | |
| 部件提示:鼠标移动到零部件时,自动显示其名称;同时该功能也可在软件设置中将其功能取消。 | ||
| 结构树:以零部件结构树方式展示机器人组成结构,结构树节点与其对应的3D零件同步高亮。 | ||
| 示教器操作 | 示教系统简介:以引出线、文字、语音等方式,逐一介绍工业机器人及其示教系统的结构及功能。 | |
| 示教盒界面显示:快捷菜单区、系统状态显示区、主菜单区、文件列表区、人机接口显示区。 | ||
| 菜单功能: | ||
| 机器人编程 | 机器人坐标系:关节坐标系(J)、基坐标系(B)、工具坐标系(T)、用户坐标系(U)。 | |
| 插补方式:关节插补、直线插补、圆弧插补。 | ||
| 程序管理 | 程序管理:程序的新建、复制程序、删除、查找、重命名。 | |
| 程序指令编辑:指令的添加、修改、删除、剪切、复制。 | ||
| 机器人指令 | 运动指令:MOVJ、MOVL、MOVC | |
| 信号处理指令:DOUT、WAIT、DELAY、DIN | ||
| 流程控制指令:LAB、JUMP、JUMP R、JUMP IN、#、END、MAIN | ||
| 运算指令:R、INC、DEC | ||
| 平移指令:PX、SHIFTON、SHIFTOFF、MSHIFT | ||
| 操作符:关系操作符、运算操作符。 | ||
| 辅助功能 | 语音阅读:系统自动识别屏幕上的文字,并进行阅读配音,更好地完成示范教学。 | |
| 加密方式:提供注册文件、密狗、网络三种可选解密方式,由用户任意选择其中一种。 | ||
| 行为监控:软件可在实训全程自动实施监控,及时发现、提醒和制止不良操作行为,从而培养良好的操作规范和安全意识,技能训练与养成教育并重,有效保障实训安全。 | ||
| 系统配置:可以对软件一些参数进行配置,例如可通过系统配置功能开关语音提示。 | ||
| 自主开发:所有能够由用户自定义的参数均应向用户开放,如所有的说明文字、配置参数均应采用EXCEL表驱动,甚至一些软件功能参数也可用EXCEL表驱动。 |
★17、实验室管理考核系统(投标时现场演示,无演示视为不响应标书)
(1)无线智能管理系统:
系统采用分布式智能管理型无线AP,通过无线技术实现终端覆盖。采用12.2英寸彩色中文触控屏的无线系统管理器,中文菜单式触控操作界面,人机对话友好。移动控制终端可控制任意一台带驱动模块的实训设备。可作学生机登录实训与考核的操作终端,也可作教师机登录出题设故的操作终端。
(2)智能化故障设置考核系统
系统可实现故障设置、故障模拟、学员考核与评份、故障排除等功能;故障设置和考核系统采用新 MCU 技术 RAM 处理芯片的数字化集成电路板与配套无线故障设置控制系统,系统稳定、不易感染病毒;控制模块(PC 控制终端或手持移动控制终端)和驱动模块(智能故障设置驱动盒)分离, 避免复杂连线干扰控制器,系统更加可靠。驱动模块内置智能故障设置控制系统,配有新型无线数据传输模块(可插拔型)和RS232 串行通讯接口,可无线组网通讯和 RS232 有线通讯。
手持移动控制终端采用12.2英寸高清晰彩色液晶触控屏,中文菜单式触控操作界面,人机对话友好。手持移动控制终端可控制任意一台带驱动模块的实训设备。手持移动控制终端不联网时可作单机操作,当带驱动模块的实训设备无线组网时,手持移动控制终端可无线进网作为联网终端,可作学生机登录实训与考核的操作终端,也可作教师机登录出题设故的操作终端。
可通过 PC 控制终端进行实训考核,也可通过手持移动控制终端进行实训考核,教师与学员界面分开,教师通过密码进入教师界面出题,学员在普通界面答题。(注:教师与 学员设故与排故界面原理图与设备面板原理图完全*)可自由设定任意一处与实训电控模块引脚有关的各种常见故障,故障类型包括:线路断 路、对地短路、接触不良,偶发等故障现象。每套驱动模块可以设置8路大电流5A的 开路故障、16路小电流2A的信号通路的开路、不良、偶发、短路等故障,共24路故 障设置。可根据需求扩展设置 64 路大电流5A的开路故障、128路小电流2A的信号通路的开路、不良、偶发、短路等故障,共192路故障设置。可根据用户使用要求调整故障设置点的数量和故障设置类型。
所有配备驱动模块的实训设备,均可通过内置的新型无线数据传输模块无线组网, 实现远程集中管理。用户可选择通过无线或 RS-232 串口通讯与其它实训设备配套的无线故障设置控制系统 组成一个网络,通过主控计算机控制每一台实训设备的故障设置、故障排除、参数设定、 远程起动、信息反馈、考核评分等功能。
三、实验、实训项目
1、硬件的安装与调试实训
1)工业机器人底座的安装与调试技术实训
2)工业机器人安装与调试技术实训
3)工业机器人夹具安装与调试技术实训
2、电气安装与调试实训
1) 工业机器人本体与控制器之间的电气连接与调试技术实训
2) 工业机器人控制器和控制柜之间电气连接与调试技术实训
3) 工业机器人夹具电气连接与调试技术实训
4) 机器人与机器人之间的电气连接实训
3、编程调试和应用实训
5) 工业机器人编程调试软件的安装实训
6) 工业机器人通过示教器对工业机器人的运作过程调试实训
7) 通过计算机软件对工业机器人的运作过程调试实训
8) 通过I/0板对机器人运作的控制实训
9) 机器人控制数据库的建立和应用实训
10) 工业机器人装配运行的编写实训
11) 工业机器人平面轨迹运行的编写实训
12) 工业机器人垂直轨迹运行的编写实训
13) 可编程控制器程序的编写和设计实训
14) 机器人与可编程控制器的总线通讯设置实训
15) 自动仓储的编程实训
16) 物流系统的编程实训
17) 多种传感器的认识以及实训
18) 机器人离线仿真的认识以及实训
19) 直流调速的认识以及实训
20) 带传动的认识以及调试
21) 上位软件的认识与调试
- 变频器 驱动器IC200UEX010耐用性强
- 变频器 冗余模块IC200UEO108为您做得到
- 变频器 驱动器IC200UAL004结构紧凑
- 接触器 模块IC200UAL005安全性能高
- 控制器 端子IC200MDL730顺丰速运
- 电源模块 伺服驱动IC200TBX340诚信经营
- 电源 机架IC200CBL520我必承诺
- 电源 机架IC200GBI001调试方便
- 控制器模块 plcIC200UEX636我们一直在努力
- 接触器 控制器IC200ALG261容量充足
- 驱动器 电缆IC200ALG240为你所委托
- 传感器 伺服驱动IC200MDL143我们一直在努力
- 变频器 驱动器IC200MDL240安全环保
- 输出模块 通讯模块IC200UEX824进口配件
- 变频器 驱动器IC200MDL144让我们做得更好
