
产品简介
| 自营品牌 | 产地类别国产 |
| 电子 |
VS-FMS02工业机器人实训装置是一种较为典型的机电一体化、自动化类产品,它是为职业院校、教育培训机构等而研制的,它适合机械制造及其自动化、机电一体化、电气工程及自动化、控制工程、测控技术、计算机控制、自动化控制等相关专业的教学和培训。
详细介绍
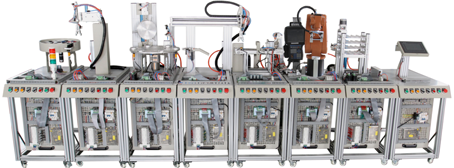
VS-FMS02柔性自动化生产线及工业机器人实训装置(八站)
一、产品概述:
VS-FMS02柔性自动化生产线及工业机器人应用实训系统,是一种较为典型的机电一体化、自动化类产品,它是为职业院校、教育培训机构等而研制的,它适合机械制造及其自动化、机电一体化、电气工程及自动化、控制工程、测控技术、计算机控制、自动化控制等相关专业的教学和培训。它接近工业生产制造现场基础上双针对实训教学进行了专门设计,强化了各种控制和工程实践能力。系统包含了机电一体化专业中的气动、电机驱动与控制、PLC、变频器、触摸屏、传感器等多种控制技术,适合相关专业学生进行工程实践、课程设计及初上岗位的工程技术人员进行培训。
二、技术参数:
1、输入电源:单相三线AC220V ±10% 50Hz
2、工作环境:环境温度范围为-5℃~+40℃ 相对湿度<85%(25℃)海拔<4000m
3、装置容量:<1.5kVA
4、设备外型尺寸:376cm×180cm×150cm
5、单站工作台尺寸:860mm×470mm×1500mm
三、系统组成:
(一)上料检测单元
由料斗、回转台、货台、螺旋导料机构、直流减速电机(10W/24V 5r/m)、光电开关、电气安装板等组成。主要完成将工件从回传上料台依次送到搬运工位。
1、主要技术指标:
| 名称 | 型号规格 | 数量 | 参考图 |
| 工作台 | 860mm×470mm | 1 | |
| 供电电源/工作电压 | AC220V 50Hz /DC24V 2A | 1 | |
| 工作气压 | 0.5MPa |
| |
| PLC模块 | CPU 1214C AC/DC/RLY | 1 | |
| 直流减速电机 | 10W/24V 5r/m | 1 | |
| 检测传感器 | 光电工业机器人实训装置漫反射检测距离50-300mm、磁感式 | 4 |

2、实训内容:
(1)*站传感器实验
(2)*站机械安装调试实验
(3)电气回路实验(一)
(4)PLC基本指令学习和实际应用实验(一)
(5)*站上料程序控制实验
(6)*站系统故障检测实验
(7)*、二站联网程序控制实验(一)
(二)搬运站
由机械手、横臂、回转台、机械手爪、旋转气缸等组成,主要完成对工件的搬运。
1、主要技术指标:
| 名称 | 型号规格 | 数量 | 参考图 |
| 工作台 | 860mm×470mm | 1 | |
| 供电电源/工作电压 | AC220V 50Hz /DC24V 2A | 1 | |
| 工作气压 | 0.5MPa |
| |
| PLC模块 | CPU 1214C AC/DC/RLY | 1 | |
| 旋转气缸 | 0~180° | 1 | |
| 双联气缸 | 行程:100mm | 1 | |
| 平行气夹 | 缸径:16mm | 1 | |
| 不回转气缸 | 行程:100mm | 1 | |
| 检测传感器 | 磁感式 | 7 |

2、实训内容:
(1)第二站气动回路学习
(2)第二站传感器实验
(3)第二站机械安装调试实验
(4)电气回路实验(二)
(5)PLC基本指令学习和实际应用实验(二)
(6)第二站搬运程序控制实验
(7)第二站系统故障检测实验
(8)第二、一站联网程序控制实验(二)
(三)加工单元
由旋转工作台、平面推力轴承、直流减速电机(10W/24V 5r/m)、刀具库(3种刀具)、升降式加工系统、加工组件、检测组件、光电传感器、转台到位传感器、步进电机、步进电机驱动器、电气挂板等组成。主要完成物料加工和深度的检测。工件在旋转平台上被检测及加工。旋转平台由直流电机驱动。平台的定位由继电器回路完成,通过电感式传感器检测平台的位置。工件在平台并行完成检测及钻孔的加工。在进行钻孔加工时,夹紧执行件夹紧工件。加工完的工件,通过电气分支送到下一个工作站。
1、主要技术指标:
| 名称 | 型号规格 | 数量 | 参考图 |
| 工作台面 | 860mm×470mm | 1 | |
| 供电电源/工作电压 | AC220V 50Hz/DC24V 2A | 1 | |
| 工作气压 | 0.5Mpa |
| |
| PLC模块 | CPU 1214C DC/DC/DC | 1 | |
| 直流减速电机 | 10W/24V 5r/m | 1 | |
| 步进电机 | 三相2.8A 步距角1.2° | 1 | |
| 步进电机驱动器 | DM556 DC18-50V供电 ,10000脉冲/圈 | 1 | |
| 双导杆气缸 | 行程:40mm | 1 | |
| 单杆气缸 | 行程:50mm | 2 | |
| 检测传感器 | 光电、电感、磁感式 | 8 |

2、实训内容:
(1)第三站气动元件学习
(2)第三站传感器实验
(3)第三站机械安装调试实验
(4)电气回路实验(三)
(5)PLC基本指令学习和实际应用实验(三)
(6)第三站多工位工作台程序控制实验
(7)第三站系统故障检测实验
(8)第三、五站联网程序控制实验(三)
(四)搬运单元
由机械手、直线移动机构、无杆气缸、薄型气缸、单杆气缸、平行气夹、工业导轨、电气安装板等组成,主要完成对工件的提取及搬运。提取装置上的气爪手将工件从前一站提起,并将工件根据前站的工件信息结果传送到下一单元。本工作单元可以与其他工作单元组合并定义其他的分类标准,工件可以被直接传输到下一个工作单元。
1、主要技术指标:
| 名称 | 型号规格 | 数量 | 参考图 |
| 工作台 | 860mm×470mm | 1 |
|
| 供电电源/工作电压 | AC220V 50Hz/DC24V 2A | 1 | |
| 工作气压 | 0.5MPa |
| |
| PLC模块 | CPU 1214C AC/DC/RLY | 1 | |
| 无杆气缸 | 行程:600mm | 2 | |
| 单杆气缸 | 行程:30mm | 1 | |
| 不回转气缸 | 行程:50mm | 1 | |
| 平行气夹 | 缸径:16mm | 1 | |
| 检测传感器 | 磁感式 | 8 |

2、实训内容:
(1)第四站气动元件和回路学习
(2)第四站传感器实验
(3)第四站机械安装调试实验(四)
(4)电气回路实验(四)
(5)PLC基本指令学习和实际应用实验
(6)第四站机械手搬运程序控制实验
(7)第四站系统故障检测实验(四)
(8)第四、五站联网程序控制实验(四)
(五)传送带站
由输送带、检测机构、推料气缸、分拣料槽、交流电动机、变频器、同步带轮、光电传感器、色标传感器等组成,主要完成对工件的输送及分拣。
1、主要技术指标:
| 名称 | 型号规格 | 数量 | 参考图 |
| 工作台 | 860mm×470mm | 1 | |
| 供电电源/工作电压 | AC220V 50Hz/DC24V 2A | 1 | |
| 工作气压 | 0.5MPa |
| |
| PLC模块 | CPU 1214C AC/DC/RLY | 1 | |
| 变频器 | MM420-0.37KW AC220 | 1 | |
| 不回转气缸 | 行程 100mm | 1 | |
| 传送带 | 电机、皮带套件 | 1 | |
| 检测传感器 | 光电、光纤、磁感式、色标 | 7 |
2、实训内容:
(1)第五站气动元件和回路学习
(2)第五站传感器实验
(3)第五站机械安装调试实验(五)
(4)电气回路实验(五)
(5)PLC基本指令学习和实际应用实验
(6)第五站工件传送程序控制实验
(7)第五站系统故障检测实验(五)
(8)第五、六站联网程序控制实验(五)
(六)安装站
由料筒、换料机构、推料机构、旋转气缸、真空吸盘、摇臂、电气安装板等组成,主要完成对两种不同工件的上料及安装。为系统逐一提供两色小工件。供料过程中,由双作用气缸从料仓中逐一推出小工件,接着,转换模块上的真空吸盘将工件吸起,转换模块的转臂在旋转缸的驱动下将工件移动至下一个工作单元的传输位置。
1、主要技术指标:
| 名称 | 型号规格 | 数量 | 参考图 |
| 工作台 | 860mm ×470mm | 1 | |
| 供电电源/工作电压 | AC220V 50Hz/DC24V 2A | 1 | |
| 工作气压 | 0.5MPa | 1 | |
| PLC模块 | CPU 1214C AC/DC/RLY | 1 | |
| 单杆气缸 | 行程:60mm | 1 | |
| 无杆气缸 | 行程:100mm |
| |
| 旋转气缸 | 180° | 1 | |
| 真空吸盘及发生器 |
| 1 | |
| 检测传感器 | 磁感式 | 6 |

2、实训内容:
(1)第六站气动元件和回路学习
(2)第六站传感器实验
(3)第六站机械安装调试实验(六)
(4)电气回路实验(六)
(5)PLC基本指令学习和实际应用实验
(6)第六站工件安装程序控制实验
(7)第六站系统故障检测实验(六)
(8)第六、七站联网程序控制实验(六)
(七)机器人安装单元
由机器人、控制器、气爪等组成,主要完成对工件的搬运,装配。
1、主要技术指标:
| 名称 | 型号规格 | 数量 | 参考图 |
| 工作台 | 860mm×470mm | 1 | |
| 供电电源/工作电压 | AC220V 50Hz/DC24V 2A | 1 | |
| 工作气压 | 0.5MPa | 1 | |
| PLC模块 | CPU 1214C AC/DC/RLY | 1 | |
| 三菱6自由度工业机器人 | 三菱RV-2F | 1 | |
| 气夹 | 缸径:16mm | 2 | |
| 检测传感器 | 磁感式 | 4 |

2、实训内容:
(1)第七站气动元件和回路学习
(2)第七站机械安装调试实验
(3)电气回路实验(七)
(4)PLC基本指令学习和实际应用实验(七)
(5)第七站工件搬运程序控制实验
(6)第七站系统故障检测实验
(7)第七、六站联网程序控制实验(七)
(8)第七、八站联网程序控制实验(七)
(9)工业机器人示教单元使用
(10)工业机器人基本指令操作与位置点设置cLbuZkoH47
(11)工业机器人软件使用
(12)工业机器人工件的跟踪抓取
(13)工业机器人成品组装
(八)分类单元
由步进电机、步进电机驱动器、滚株丝杆、立体库、推料气缸、电感传感器、电磁阀、电气安装板等组成。主要完成对成品工件分类存储。
1、主要技术指标:
| 名称 | 型号规格 | 数量 | 参考图 |
| 工作台面 | 860mm× 470mm | 1 | |
| 供电电源/工作电压 | AC220V 50Hz/DC24V 2A | 1 | |
| 工作气压 | 0.5MPa |
| |
| PLC模块 | CPU 1214C AC/DC/RLY | 1 | |
| 步进电机驱动器 | 64细分 DM556 | 2 | |
| 步进电机 | 1.5A 角距:1.8度 | 2 | |
| 单杆气缸 | 行程:50mm | 1 | |
| 滚珠丝杆 | 行程≥370mm | 2 |
2、实训内容:
(1)第八站气动元件和回路学习
(2)第八站机械安装调试实验
(3)电气回路实验(八)
(4)PLC基本指令学习和实际应用实验(八)
(5)第八站工件分类程序控制实验
(6)第八站系统故障检测实验
(7)第八、七站联网程序控制实验(八)
(8)全部八站联网程序控制实验(八)
(9)步进电机驱动控制实验
(九)主控单元:
主要完成监视各分站的工作状态并协调各站运行,完成工业控制网络的集成。总线结构采用工业以太网通信,使各站之间的控制信息和状态数据能够实时相互交换。
1、主要技术指标:
| 序号 | 名称 | 规格 | 数量 | 单位 |
| 1 | 触摸屏 | 昆仑通态TPC7062TI 7英寸 | 1 | 台 |
| 2 | 西门子S7-1500主机 | CPU 1511-1 PN | 1 | 台 |
| 3 | 存储卡:4 MB | 1 | 台 | |
| 4 | S7-1500 安装导轨:160 mm | 1 | 台 | |
| 5 | PM1507:额定输入电压 120 V / 230 V AC 自适应,输出24 V / 3 A | 1 | 台 | |
| 6 | 工业交换机 | 中国台湾 MOXA EDS-208 8端口 | 2 | 台 |
(十)MCGS工业组态监控软件:
当8个单元全部进入联网状态时,管理员能够通过组态监控机中各种组态按钮方便的控制整个系统的运行、停止等。每个单元的工作状态以及工件的材质、颜色等在监控画面上也能够清楚的看到。
(十一)配件
| 序号 | 名称 | 规格 | 数量 | 单位 | 备注 |
| 1. | 工件 | 白色工件 | 12 | 只 |
|
| 2. | 蓝色、红色工件 | 8 | 只 |
| |
| 3. | 黑色工件 | 12 | 只 |
| |
| 4. | 小工件 | 白色、黑色 | 24 | 只 |
|
| 5. | PLC编程 |
| 1 | 套 |
|
| 6. | PLC编程软件 | 博图V14 | 1 | 套 |
|
| 7. | 配套工具 | 工具箱:十字长柄螺丝刀,大、中、小号一字螺丝刀,中、小号十字螺丝刀,剥线钳,尖嘴钳,剪刀,电烙铁,镊子,活动扳手,内六角扳手(9把) | 1 | 套 |
|
| 8. | 配套光盘 | 使用手册、程序等 | 1 | 套 |
|
| 9. | 空气压缩机 | 静音空气压缩机 | 1 | 台 | 静音 |
★(十二)工业4.0仿真实训软件(需提供软件著作权证书和现场演示)
软件采用三维建模基于虚拟现实技术的计算机仿真模拟技术,可以进行PLC电气控制仿真、气动仿真、液压仿真、传感器仿真等工业常用技术仿真。
1、PLC仿真可以通过PLC编程控制模型的相应动作从而完成工序动作包含机械手仿真、自动门仿真、升降机仿真、分拣仿真、正反转仿真、邮件分拣、流水线、自动分拣等。
2、气动回路仿真
(1)软件以气动经典22回路为依据开发出28回路的在线及离线仿真
(2)软件中设置的14路“考考你!”表现为典型气路设备故障。
(3)软件状态含“模拟运行”“联机运行”即离线仿真、在线仿真。两种运行状态自动切换,当连接外部设备时自动切换为在线仿真,无外部设备连接时为离线仿真即模拟运行。
软件中离线仿真13个回路包括:1、单作用气缸的换向回路(a)2、双作用气缸的换向回路(a)3、单作用气缸的速度控制回路(a)4、单作用气缸的速度控制回路(b)5、双作用气缸单向调速回路(a)6、双作用气缸单向调速回路(b)7、双作用气缸的速度控制回路一 8、双作用气缸的速度控制回路二 9、压力控制回路 10、计数回路 11、延时回路 12、用机械行程阀的单往复控制回路 13、过载保护回路。
离线、在线自动切换的15个回路包括:1、单作用气缸的换向回路(b)2、双作用气缸的换向回路(b)3、速度换接回路4、缓冲回路5、互锁回路6、用行程开关的单缸往复运动回路7、单缸连续往复动作回路8、直线缸、旋转缸顺序动作回路9、多缸顺序动作回路10、双缸同步动作回路11、四缸联动回路12、卸荷回路13、或门型梭阀的应用回路14、快速排气阀的应用回路15、高低压切换控制回路。
(4)设置14路“考考你!”当点开了“考考你”对话框回路自动设置故障,当回答正确或关闭“考考你”对话框,故障自动接触,回路正常仿真。14路“考考你”包括模拟故障有:1单作用气缸故障2、电磁阀故障3、双作用气缸故障4、调节阀故障5、节流阀故障6、手动换向阀异常7、节流阀堵死故障8、行程开关故障9过滤三联件故障10、气容故障11、行程阀故障12、顺序阀故障13、行程开关失灵14、负载阻力过小
3)液压回路仿真其界面可清楚的展示液压元器件的内部结构以及液压回路的工作过程。液压传动原理的动态演示并不少于18种动态演示。
a) 多级高压回路b) 减压回路c) 先导式溢流阀缷荷回路d) 顺序平衡回路e) 回油节流调速回路 f) 旁路节流调速回路 g) 液压缸差动连接回路
h) 三位四通电磁换向阀换向回路 i) 液控单向阀锁紧回路 j) 顺序阀控制顺序动作回路k) 压力继电器控制顺序动作回路 l) 行程开关控制顺序同步回路 m) 调速阀控制同步回路 n) 液压马达回油节流调速回路 o) 二位四通电磁阀换向回路 p) 手动阀换向回路 q) 速度换接回路 r) 二位二通缷荷
★(十三)电气控制仿真软件(需提供软件著作权证书)
以三维仿真交互技术和三维动画视觉表现及多媒体数字技术为核心,能进行三维电路分析、电气电路模拟电路考核、综合技能虚拟实训、电气基础训练、元器件识别检测。
1、软件模拟线路故障根据故障现象使用各种虚拟仪表进行排故
2、学员根据电路图自己布局电气设备并连接线路,自动检测线路错误。
3、电机及电气三维元件装配
4、元器件检测
5、电气电路仿真
6、自动门仿真
7、升降机仿真
8、机床电气实训排故实训
9、仪器仪表的使用万用表、双踪示波器、信号发生器、频谱仪、钳形表
10、机械手仿真
★(十四)自动化创新应用云平台模块(投标现场演示)
本平台将物联网技术运用于电气自动化信息技术并将数据上传至云平台,进行海量数据存储,并提供丰富的数据分析工具方便更加准确的掌握数据与分析数据。
(1)数据云系统上传(2)手机app数据查询(3)历史数据查询(4)数据分析统计(5)短信报警(6)微信报警(7)微信反向控制(8)二次开发
1、云平台包含:
(1)数据显示显示输入电压监控,输出电压监控,输入开关监控,输出开关控制以及输入电压模拟量实时数据,可根据实际需求添加128路。
(2)控制:控制启动停止开关的开和关,输出电压值的给定,可根据实际需求添加128路。
(3)历史数据:显示输入输出电压值的历史数据,可按时、天、月进行查询历史数据曲线,以及历史数据表格,可表格数据导出处理。
(4)设备报警:对设备急停按键做的模拟设备故障报警进行微信报警,同时可以实现短信及邮件报警。报警范围包括模拟量,开关量的上下线、阀值等状态进行设置报警。
2、终端包含:
(1)数据显示画面:画面显示输入电压数值,输出电压监控,开关状态输入,开关控制输出,以及云端连接二维码。
(2)联网设置界面:设置现场数据连接云平台后台数据库管理。
★(十五)便携式电子信号测试记录模块
1、具备电压、电流、温度采集,可以记录观察电压、电流跳变的图像数据,精度±0.05%真有效值测量USB数据传输,彩屏LCD显示
2、具有示波器、虚拟频谱仪、虚拟万用表、虚拟数字量输入输出模块。
3、集双通道电子信号图像数据采集记录仪、频谱分析仪和逻辑分析仪于一体,不低于60M,具有1KHz基准方波输出接口;图像数据可以按时间和电压输出到EXCEL、BMP和OSC;数据记录大4G;FFT、相关和功率谱频谱分析,FFT支持8~1048576点的选择,支持triangular、cosine、Bohman、Parzen等 18种窗;
4、功率谱支持自功率谱和互功率谱的计算;相关支持自相关和互相关的计算;
5、虚拟任意波形输出模块,频率25Mz ,输出波形:正弦波,三角波,方波,TTL,任意波形。
6、虚拟万用表模块:直流电压,量程60.00mV、600.00mV、6.00V、60.00V、600.0V、800V;交流电压测量,量程 60.00mV 、600.00mV、6.00V、60.00V、600.0V;直流电流测量,量程 60.00mA 、600.00mA 、6.000A、10.00A;交流电流测量,量程 60.00mA、600.00mA、6.000A、10.00A;电阻测量,量程 600、6.000 K、60.00 K、600.0 K、6.000 M 、60.00 M;电容测量,量程 40.00nF 、400.00nF、4.000uF、40.00uF、400.0uF;二极管测量 0V~2.0V
★7、虚拟电子测量仪器系统软件(需提供需提供软件著作权证书)
(1)本软件系统由安装于实验台学生机上的实验软件和教师机上的管理软件组成,要求程序均由LabVIEW软件编制。中文菜单式操作界面,人机对话友好。学生在启动程序后,键入自己的学号,系统即在教师机数据库中找出该学生的姓名,经过学生确认后,学生选择所要做的相应实验,即进入正常的实验界面。
(2)能实现密码登录系统,设置数据库路,系统测试(查询设备),学生库设置,题库与题库等级设置,考核试卷提取与存储考核时间设置与启动,考核成绩查询,考核成绩打印,登录密码修改与恢复。
(3)学生终端采用LabVIEW软件编制具有联机考核功能,学号查询,故障解除,时间查询,分数查询,设备号查询,学生实验数据、学生考勤及学生考试、学生实验选做等管理功能。
(4)学生在启动程序后,键入自己的学号,系统即在教师机数据库中找出该学生的姓名,经过学生确认后,学生选择所要做的相应实验,即进入正常的实验界面。
8、整个实验室配置1套
四、实训项目:
1、了解传感器的应用
2、观察气动元件的应用
3、掌握PLC控制技术
(1)系统故障检测
(2)工件上料程序控制
(3)工件搬运程序控制
(4)工件检测程序控制
(5)工件搬运安装程序控制
(6)工件安装程序控制
(7)工件分类程序控制
(8)多工作工位程序控制
(9)工作单元联网程序控制
(10)步进电机驱动控制
(11)机械手搬运控制
(12)成废品分拣控制
(13)变频调速控制
(14)传输带控制等
4、电气控制系统安装调试
5、机械系统安装调试
6、电机驱动调试
7、系统维护和故障检测技术
8、工业机器人实训
(1)工业机器人示教单元使用
(2)工业机器人基本指令操作与位置点设置
(3)工业机器人软件使用
(4)工业机器人工件的跟踪抓取
(5)工业机器人成品组装
- 冗余模块电机模块IC693MDL645安全可靠
- 接触器控制器IC693MDR390质量可靠
- 接触器输入模块IC693ALG220D为你所委托
- 输入模块cpuIC693MDL330耐冲击性能好
- 冗余模块模块IC693PTM100诚信经营
- 电缆传感器IC693ACC333结构紧凑
- 模块电源IC693MDL753D为您做得到
- 冗余模块模块IC697CPM924超大库存
- plc卡件IC693MDL260控制性能好
- 电源机架IC693MDL931操作灵活
- BENTLY本特利卡件128015-11技术参数
- 美国Bently Nevada板卡133292-01性能介绍
- 美国Bently Nevada板卡133442-01现货特价
- BENTLY本特利卡件138700-01A08使用方法
- 美国Bently Nevada板卡128229-01A01性能介绍
