资讯详情
福延镇WPL040L2-i-P2-S2-8-25-30-46-M4开创新局面
发布者:eastour001 发布时间:2024-04-29 11:41:32
福延镇WPL040L2-i-P2-S2-8-25-30-46-M4开创新局面
高压水流清洗机专用行星减速机的工作原理及行星减速机的应用范围如下:
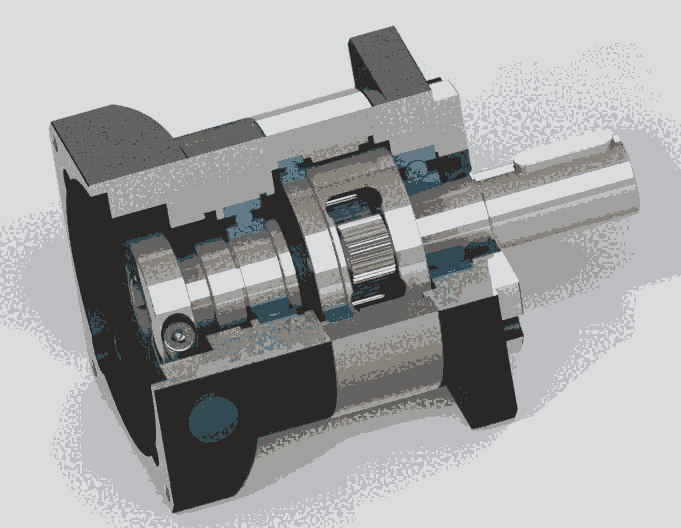
行星减速机的工作原理:
行星减速机的工作原理是利用行星轮系实现动力传输和减速。当输入轴旋转时,轮毂带动齿轮旋转,齿轮又将动力传递给行星轮,行星轮围绕轮毂旋转,同时带动中心轴旋转。通过这样的结构,当输入轴旋转一定角度时,输出轴就会旋转较小的角度,从而达到减速的目的。
行星减速机的优点:
减速比大:行星减速机的减速比通常较大,能够实现较大的动力传输。
结构紧凑:行星减速机的结构紧凑,体积小,占用空间少。
转速低:由于行星减速机的减速比大,因此能够实现较低的转速输出。
噪音小:行星减速机的设计通常注重噪音控制,因此运行时噪音相对较小。
率:行星减速机的传动效率较高,能够实现较高的动力传输效率。
扭矩大:由于行星减速机的紧凑结构和传动,使得其能够承受较大的扭矩。
齿轮结构简单:行星减速机的齿轮结构相对简单,维护方便。
行星减速机的应用范围:
行星减速机被广泛应用于各种需要减速和增扭的场合,如机器人、自动化设备、工程机械、石油化工机械、矿山机械、纺织机械、造纸机械等领域。在这些领域中,行星减速机都发挥了重要作用。
在高压水流清洗机中,行星减速机主要用于驱动和调节水流的压力和流量,以保证清洗机能够正常工作并实现的清洗效果。在高压水流清洗机中,行星减速机的主要作用是将电机的动力转化为较低的转速和较高的扭矩,驱动高压泵产生高压水流,对物体表面进行清洗。同时,通过调节行星减速机的传动比,可以控制高压泵的转速和高压水流的压力,以满足不同的清洗需求。
此外,行星减速机还广泛应用于高压水流清洗机的控制系统。控制系统需要地控制行星减速机的转速和扭矩,以确保高压水流清洗机的稳定运行和清洗效果。通过控制系统,可以实现对行星减速机的远程控制和自动化控制,提高清洗效率和质量。
总之,在高压水流清洗机中,行星减速机是实现动力传输、减速和调节压力流量的重要部件,对清洗机的正常运行和使用效果有着重要影响。因此,在选择和使用行星减速机时,应考虑其性能、质量、可靠性以及与清洗机的匹配性等因素。
福延镇WPL040L2-i-P2-S2-8-25-30-46-M4开创新局面

NB042-L1-3-S2-P1
NB042-L1-4-S2-P1
NB042-L1-5-S2-P1
NB042-L1-6-S2-P1
NB042-L1-7-S2-P1
NB042-L1-8-S2-P1
NB042-L1-10-S2-P1
NB042-L2-12-S2-P1
NB042-L2-15-S2-P1
NB042-L2-16-S2-P1
NB042-L2-20-S2-P1
NB042-L2-25-S2-P1
NB042-L2-28-S2-P1
NB042-L2-30-S2-P1
NB042-L2-35-S2-P1
NB042-L2-40-S2-P1
NB042-L2-50-S2-P1
NB042-L2-70-S2-P1
NB042-L2-100-S2-P1
NB060-L1-3-S2-P1
NB060-L1-4-S2-P1
NB060-L1-5-S2-P1
NB060-L1-6-S2-P1
NB060-L1-7-S2-P1
NB060-L1-8-S2-P1
NB060-L1-10-S2-P1
NB060-L2-12-S2-P1
NB060-L2-15-S2-P1
NB060-L2-16-S2-P1
NB060-L2-20-S2-P1
NB060-L2-25-S2-P1
NB060-L2-28-S2-P1
NB060-L2-30-S2-P1
NB060-L2-35-S2-P1
NB060-L2-40-S2-P1
NB060-L2-50-S2-P1
NB060-L2-70-S2-P1
NB060-L2-100-S2-P1
福延镇WPL040L2-i-P2-S2-8-25-30-46-M4开创新局面
伺服行星齿轮减速机和谐波减速器在关节机械人设备上的适配性分析
一、引言
关节机械人是现代工业、、等领域中广泛应用的一种高精度、高灵活性的机器人设备。伺服行星齿轮减速机和谐波减速器作为两种常用的传动装置,在关节机械人的应用中具有重要的作用。本文将对这两种减速机在关节机械人设备上的适配性进行分析,以期为关节机械人的设计和应用提供参考。
二、关节机械人的传动需求
关节机械人需要通过传动装置实现各关节的控制和协调运动。传动装置的性能直接影响到关节机械人的运动精度、动态性能和寿命。因此,关节机械人对传动装置有以下要求:
高精度:关节机械人需要实现高精度的位置控制和轨迹跟踪,传动装置必须具有较高的传动精度和回差精度。
高刚性:关节机械人在运动过程中需要承受较大的惯性和冲击力,传动装置必须具备较高的刚性和抗冲击能力。
率:关节机械人需要实现的运动和能量传输,传动装置必须具有较高的传动效率和较低的能耗。
小体积:关节机械人的结构紧凑,传动装置需要尽可能减小体积和重量,以便于集成和安装。
三、伺服行星齿轮减速机在关节机械人设备上的适配性分析
伺服行星齿轮减速机具有高精度、高刚性、率等优点,适用于许多高要求的应用场景。在关节机械人设备上,伺服行星齿轮减速机具有以下适配性:
高精度:伺服行星齿轮减速机采用行星轮系的传动原理,能够实现高精度的位置控制和轨迹跟踪,满足关节机械人对传动精度的要求。
高刚性:伺服行星齿轮减速机的行星轮和内齿圈之间采用刚性连接,能够承受较大的惯性和冲击力,满足关节机械人对刚性的要求。
率:伺服行星齿轮减速机的传动效率高,能够实现的运动和能量传输,降低关节机械人的能耗。
易于控制:伺服行星齿轮减速机可以与伺服电机直接连接,实现的速度和位置控制,方便关节机械人的运动控制。
四、谐波减速器在关节机械人设备上的适配性分析
谐波减速器具有体积小、结构紧凑、传动比大等优点,适用于空间受限或需要较大传动比的场景。在关节机械人设备上,谐波减速器具有以下适配性:
小体积:谐波减速器的体积小,结构紧凑,能够方便地集成到关节机械人的结构中,减小整体体积和重量。
大传动比:谐波减速器的传动比大,能够在较小的空间内实现较大的减速比,满足关节机械人对传动比的要求。
易于维护:谐波减速器的结构相对简单,维护方便,能够降低关节机械人的维护成本。
五、结论
通过对伺服行星齿轮减速机和谐波减速器在关节机械人设备上的适配性分析,可以得出以下结论:
伺服行星齿轮减速机适用于对精度、刚性和效率要求较高的关节机械人设备,能够实现高精度的位置控制和轨迹跟踪,提高关节机械人的运动精度和动态性能。
谐波减速器适用于空间受限或需要较大传动比的关节机械人设备,能够减小整体体积和重量,降低维护成本。在实际应用中,应根据关节机械人的具体需求和使用环境进行综合评估和选择。

福延镇WPL040L2-i-P2-S2-8-25-30-46-M4开创新局面
高压水流清洗机专用行星减速机的工作原理及行星减速机的应用范围如下:
行星减速机的工作原理:
行星减速机的工作原理是利用行星轮系实现动力传输和减速。当输入轴旋转时,轮毂带动齿轮旋转,齿轮又将动力传递给行星轮,行星轮围绕轮毂旋转,同时带动中心轴旋转。通过这样的结构,当输入轴旋转一定角度时,输出轴就会旋转较小的角度,从而达到减速的目的。
行星减速机的优点:
减速比大:行星减速机的减速比通常较大,能够实现较大的动力传输。
结构紧凑:行星减速机的结构紧凑,体积小,占用空间少。
转速低:由于行星减速机的减速比大,因此能够实现较低的转速输出。
噪音小:行星减速机的设计通常注重噪音控制,因此运行时噪音相对较小。
率:行星减速机的传动效率较高,能够实现较高的动力传输效率。
扭矩大:由于行星减速机的紧凑结构和传动,使得其能够承受较大的扭矩。
齿轮结构简单:行星减速机的齿轮结构相对简单,维护方便。
行星减速机的应用范围:
行星减速机被广泛应用于各种需要减速和增扭的场合,如机器人、自动化设备、工程机械、石油化工机械、矿山机械、纺织机械、造纸机械等领域。在这些领域中,行星减速机都发挥了重要作用。
在高压水流清洗机中,行星减速机主要用于驱动和调节水流的压力和流量,以保证清洗机能够正常工作并实现的清洗效果。在高压水流清洗机中,行星减速机的主要作用是将电机的动力转化为较低的转速和较高的扭矩,驱动高压泵产生高压水流,对物体表面进行清洗。同时,通过调节行星减速机的传动比,可以控制高压泵的转速和高压水流的压力,以满足不同的清洗需求。
此外,行星减速机还广泛应用于高压水流清洗机的控制系统。控制系统需要地控制行星减速机的转速和扭矩,以确保高压水流清洗机的稳定运行和清洗效果。通过控制系统,可以实现对行星减速机的远程控制和自动化控制,提高清洗效率和质量。
总之,在高压水流清洗机中,行星减速机是实现动力传输、减速和调节压力流量的重要部件,对清洗机的正常运行和使用效果有着重要影响。因此,在选择和使用行星减速机时,应考虑其性能、质量、可靠性以及与清洗机的匹配性等因素。
福延镇WPL040L2-i-P2-S2-8-25-30-46-M4开创新局面
NB042-L1-3-S2-P1
NB042-L1-4-S2-P1
NB042-L1-5-S2-P1
NB042-L1-6-S2-P1
NB042-L1-7-S2-P1
NB042-L1-8-S2-P1
NB042-L1-10-S2-P1
NB042-L2-12-S2-P1
NB042-L2-15-S2-P1
NB042-L2-16-S2-P1
NB042-L2-20-S2-P1
NB042-L2-25-S2-P1
NB042-L2-28-S2-P1
NB042-L2-30-S2-P1
NB042-L2-35-S2-P1
NB042-L2-40-S2-P1
NB042-L2-50-S2-P1
NB042-L2-70-S2-P1
NB042-L2-100-S2-P1
NB060-L1-3-S2-P1
NB060-L1-4-S2-P1
NB060-L1-5-S2-P1
NB060-L1-6-S2-P1
NB060-L1-7-S2-P1
NB060-L1-8-S2-P1
NB060-L1-10-S2-P1
NB060-L2-12-S2-P1
NB060-L2-15-S2-P1
NB060-L2-16-S2-P1
NB060-L2-20-S2-P1
NB060-L2-25-S2-P1
NB060-L2-28-S2-P1
NB060-L2-30-S2-P1
NB060-L2-35-S2-P1
NB060-L2-40-S2-P1
NB060-L2-50-S2-P1
NB060-L2-70-S2-P1
NB060-L2-100-S2-P1
福延镇WPL040L2-i-P2-S2-8-25-30-46-M4开创新局面
伺服行星齿轮减速机和谐波减速器在关节机械人设备上的适配性分析
一、引言
关节机械人是现代工业、、等领域中广泛应用的一种高精度、高灵活性的机器人设备。伺服行星齿轮减速机和谐波减速器作为两种常用的传动装置,在关节机械人的应用中具有重要的作用。本文将对这两种减速机在关节机械人设备上的适配性进行分析,以期为关节机械人的设计和应用提供参考。
二、关节机械人的传动需求
关节机械人需要通过传动装置实现各关节的控制和协调运动。传动装置的性能直接影响到关节机械人的运动精度、动态性能和寿命。因此,关节机械人对传动装置有以下要求:
高精度:关节机械人需要实现高精度的位置控制和轨迹跟踪,传动装置必须具有较高的传动精度和回差精度。
高刚性:关节机械人在运动过程中需要承受较大的惯性和冲击力,传动装置必须具备较高的刚性和抗冲击能力。
率:关节机械人需要实现的运动和能量传输,传动装置必须具有较高的传动效率和较低的能耗。
小体积:关节机械人的结构紧凑,传动装置需要尽可能减小体积和重量,以便于集成和安装。
三、伺服行星齿轮减速机在关节机械人设备上的适配性分析
伺服行星齿轮减速机具有高精度、高刚性、率等优点,适用于许多高要求的应用场景。在关节机械人设备上,伺服行星齿轮减速机具有以下适配性:
高精度:伺服行星齿轮减速机采用行星轮系的传动原理,能够实现高精度的位置控制和轨迹跟踪,满足关节机械人对传动精度的要求。
高刚性:伺服行星齿轮减速机的行星轮和内齿圈之间采用刚性连接,能够承受较大的惯性和冲击力,满足关节机械人对刚性的要求。
率:伺服行星齿轮减速机的传动效率高,能够实现的运动和能量传输,降低关节机械人的能耗。
易于控制:伺服行星齿轮减速机可以与伺服电机直接连接,实现的速度和位置控制,方便关节机械人的运动控制。
四、谐波减速器在关节机械人设备上的适配性分析
谐波减速器具有体积小、结构紧凑、传动比大等优点,适用于空间受限或需要较大传动比的场景。在关节机械人设备上,谐波减速器具有以下适配性:
小体积:谐波减速器的体积小,结构紧凑,能够方便地集成到关节机械人的结构中,减小整体体积和重量。
大传动比:谐波减速器的传动比大,能够在较小的空间内实现较大的减速比,满足关节机械人对传动比的要求。
易于维护:谐波减速器的结构相对简单,维护方便,能够降低关节机械人的维护成本。
五、结论
通过对伺服行星齿轮减速机和谐波减速器在关节机械人设备上的适配性分析,可以得出以下结论:
伺服行星齿轮减速机适用于对精度、刚性和效率要求较高的关节机械人设备,能够实现高精度的位置控制和轨迹跟踪,提高关节机械人的运动精度和动态性能。
谐波减速器适用于空间受限或需要较大传动比的关节机械人设备,能够减小整体体积和重量,降低维护成本。在实际应用中,应根据关节机械人的具体需求和使用环境进行综合评估和选择。
福延镇WPL040L2-i-P2-S2-8-25-30-46-M4开创新局面
来源:厦门伊诗图电气有限公司
版权声明:机电一体化网转载作品均注明出处,本网未注明出处和转载的,是出于传递更多信息之目的,并不意味 着赞同其观点或证实其内容的真实性。如转载作品侵犯作者署名权,或有其他诸如版权、肖像权、知识产权等方面的伤害,并非本网故意为之,在接到相关权利人通知后将立即加以更正。联系电话:0571-87774297。
企业信息

今日最新资讯
